2.2 Sketching Haptic Interactions
Concept
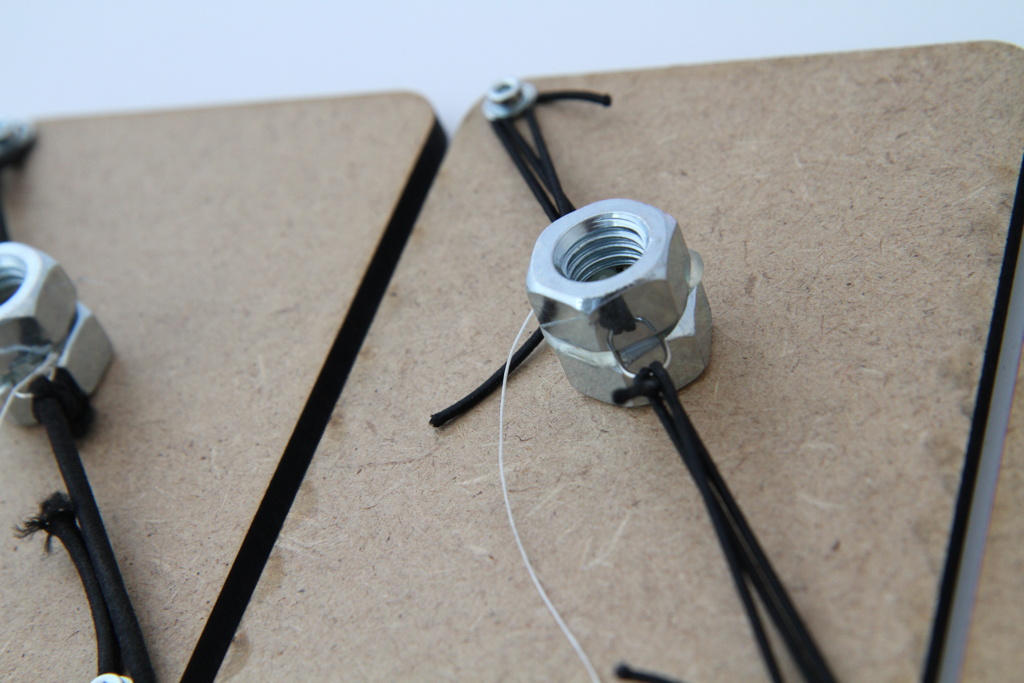
Bouncing element to match bouncing UI when reach out of bound limit.
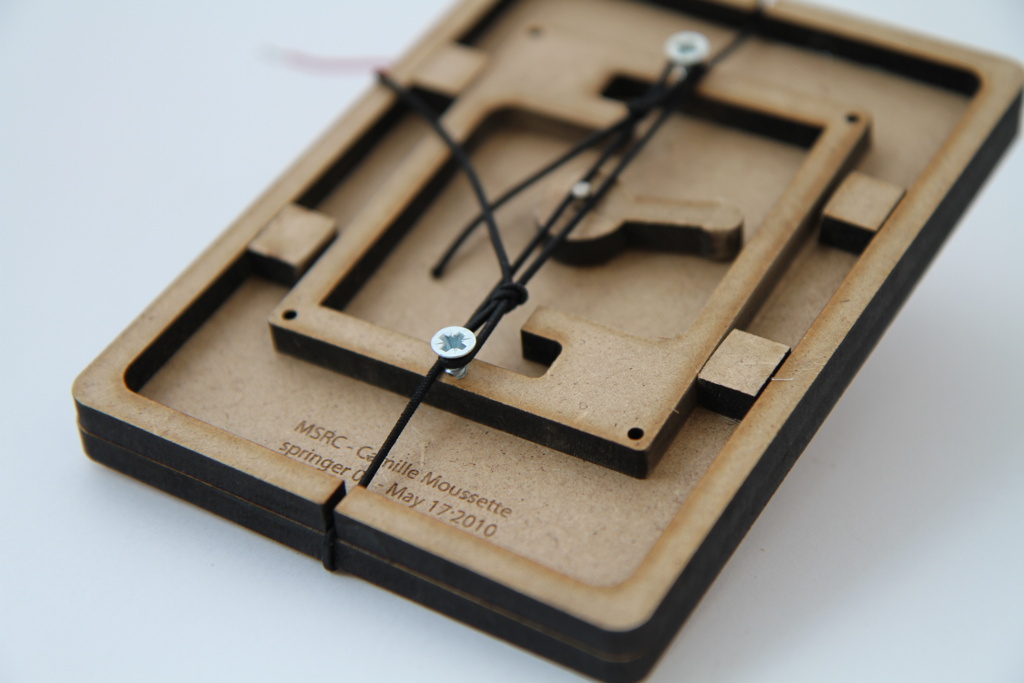
Springer 00
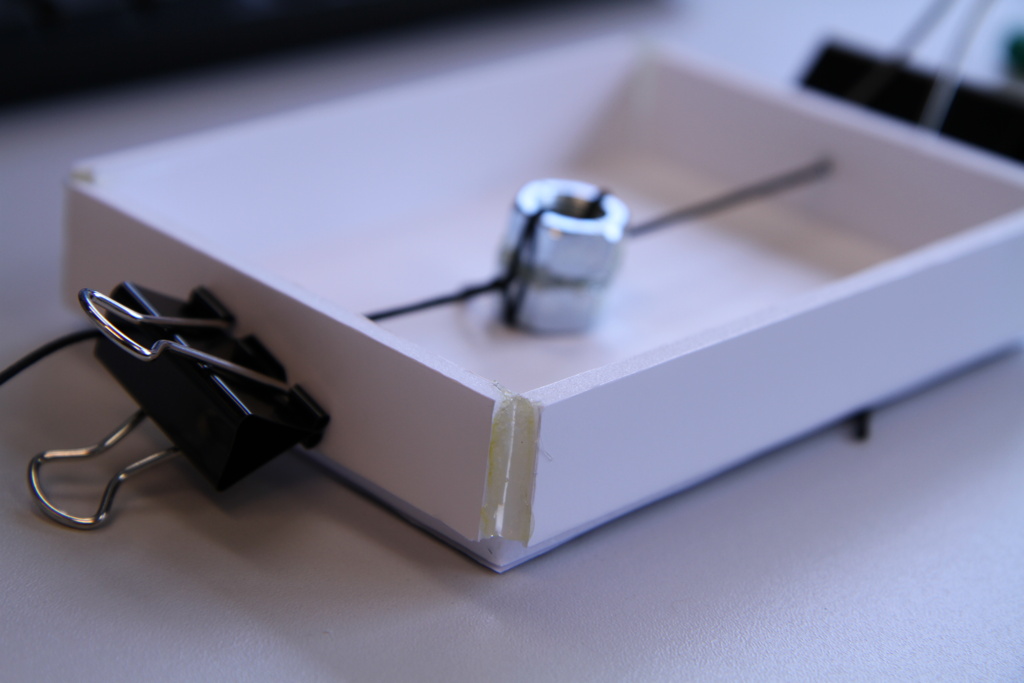
I tried initially to have a paddle hit the target. The haptic feedback was quite nice and accurate, but the the paddle was only grabbing the piece once every 5 or 6 times.
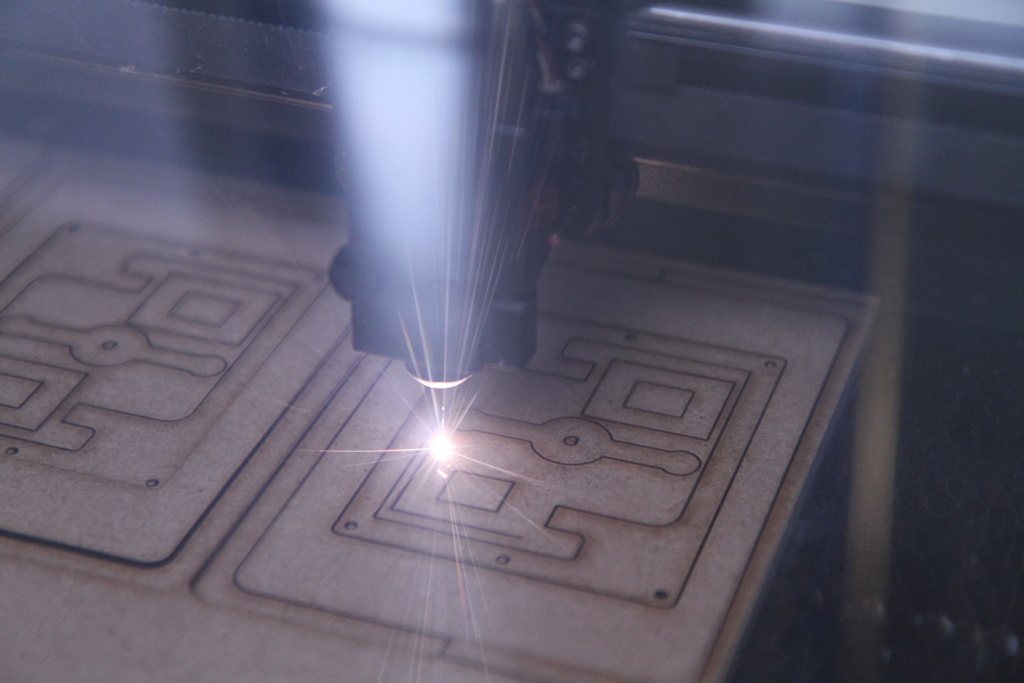
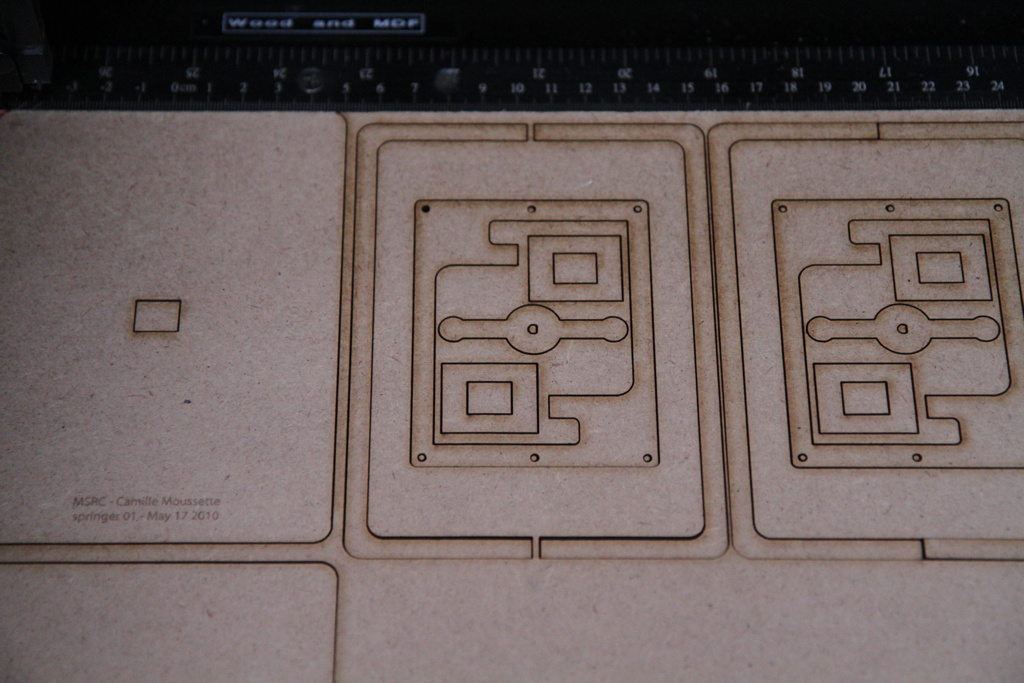
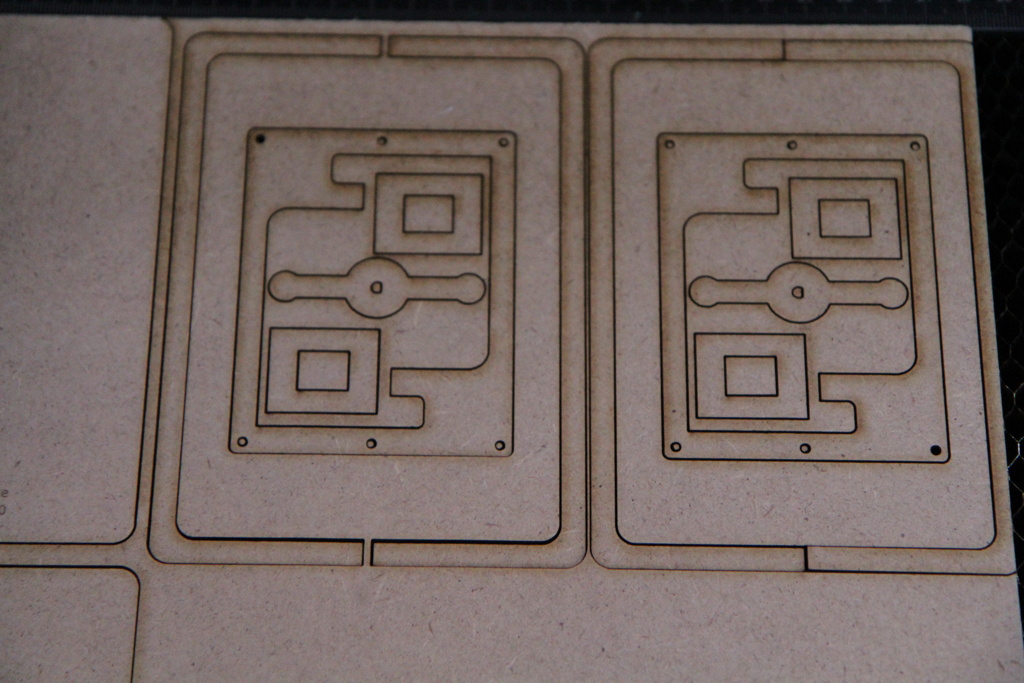
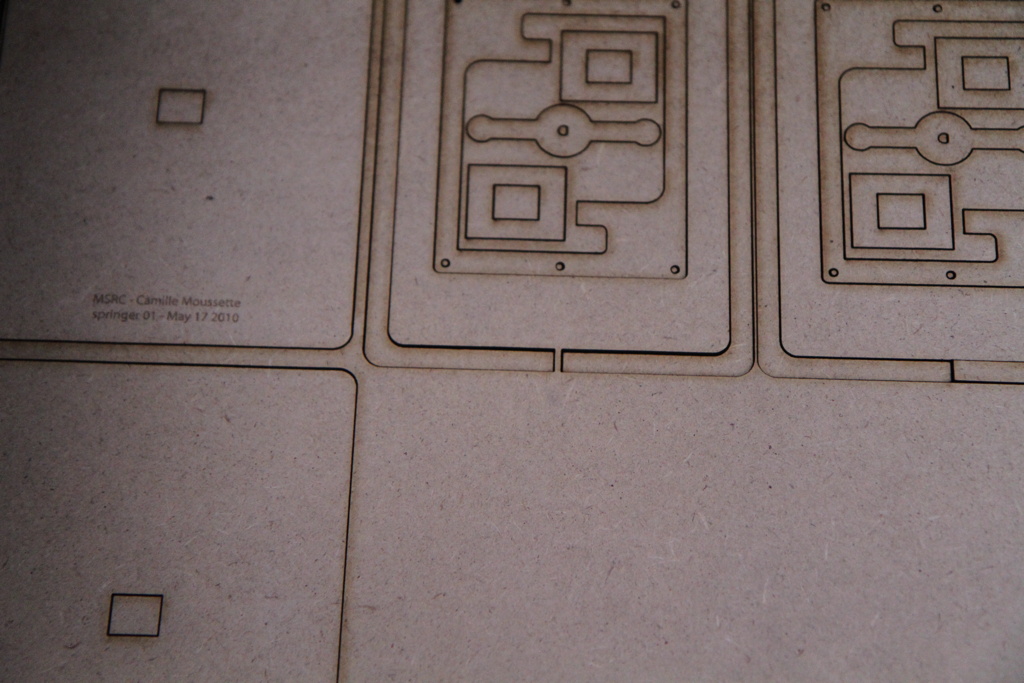
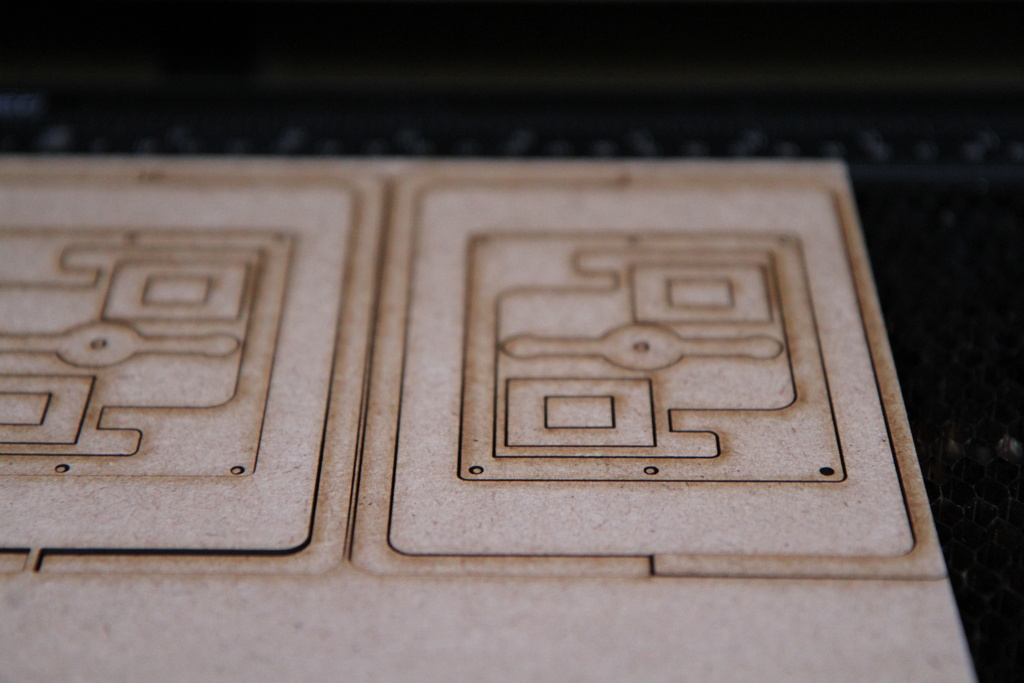
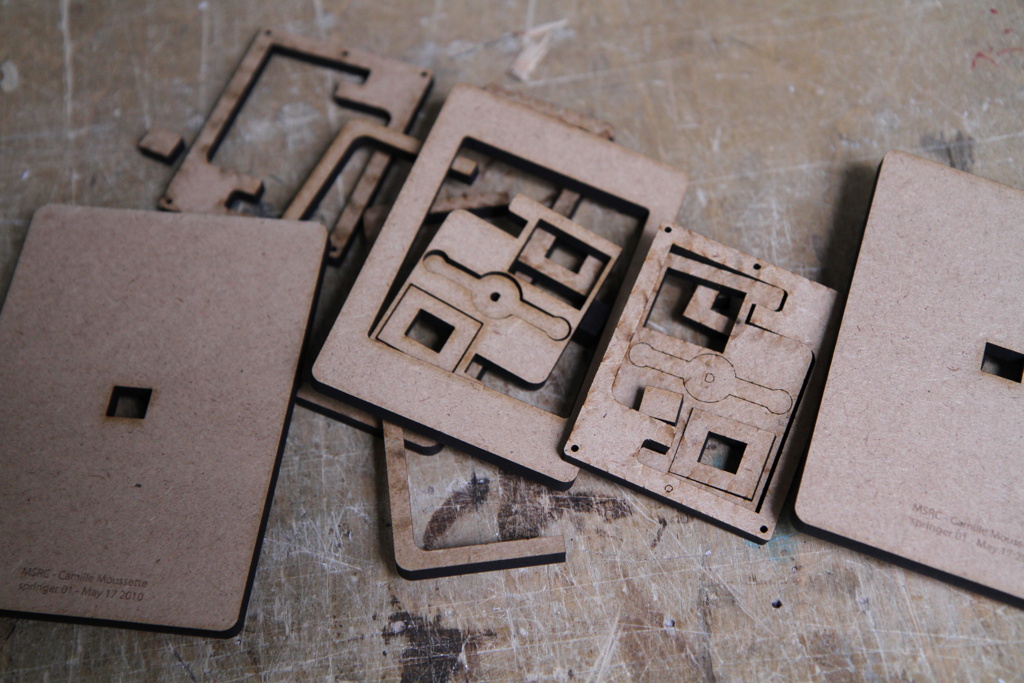
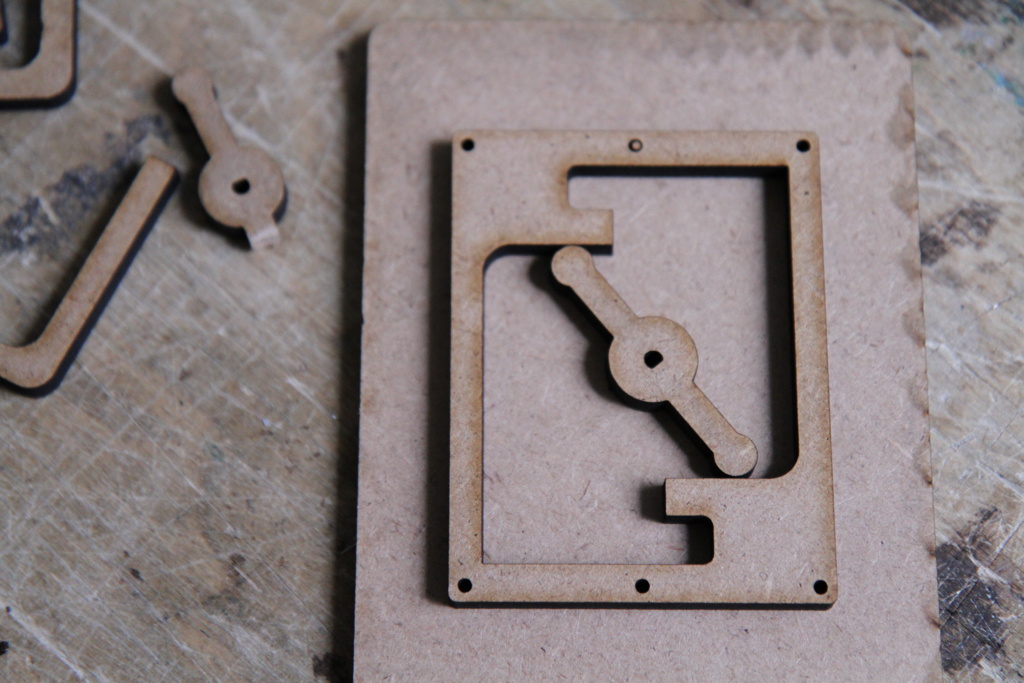
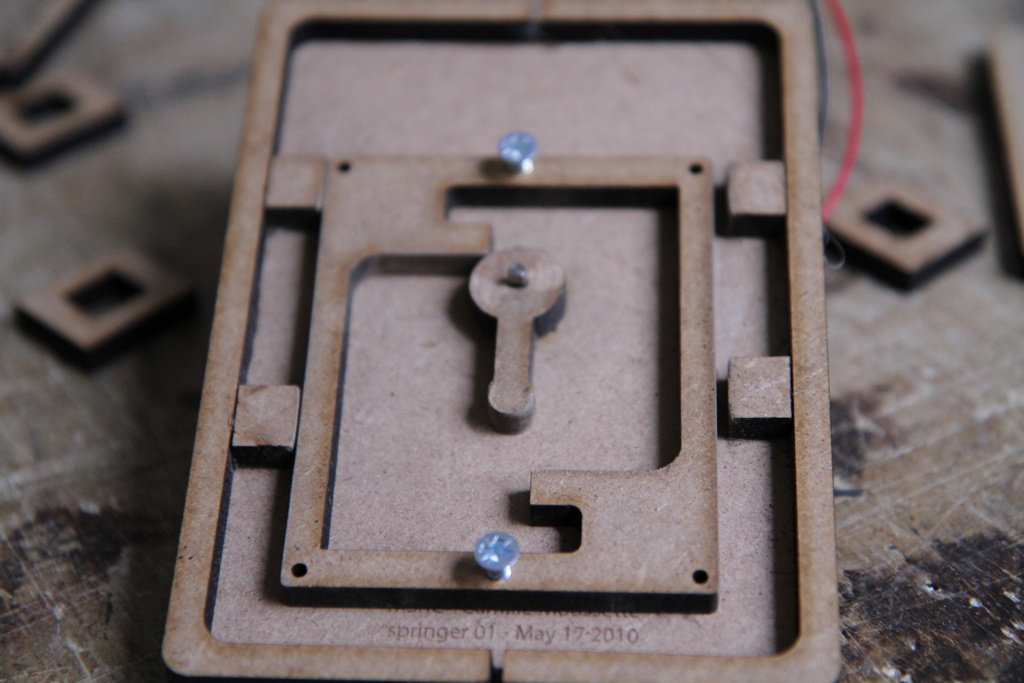
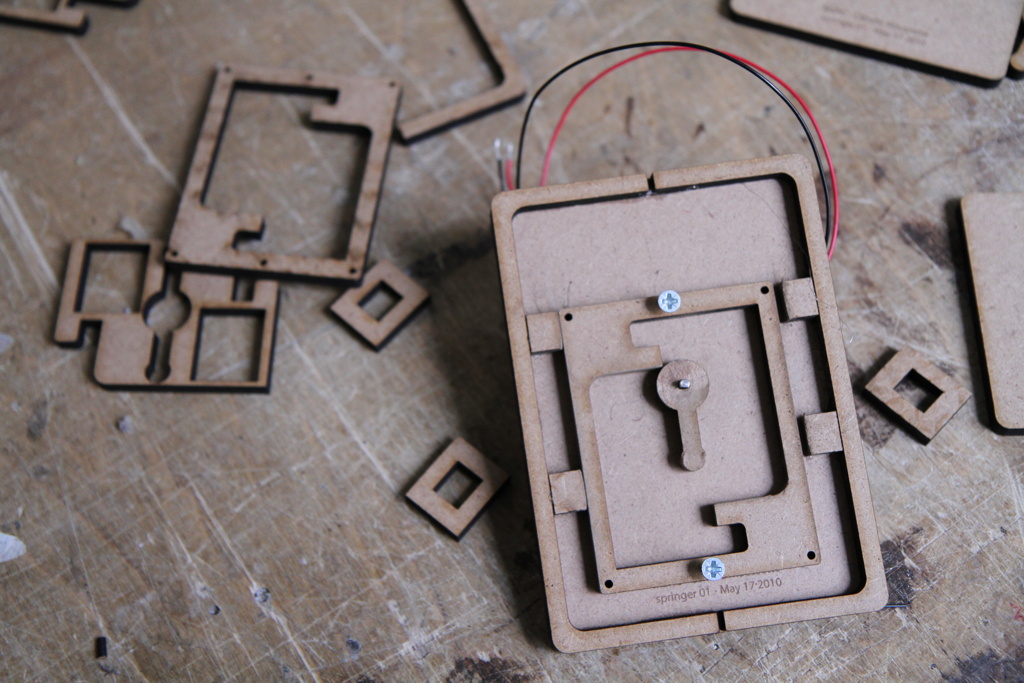
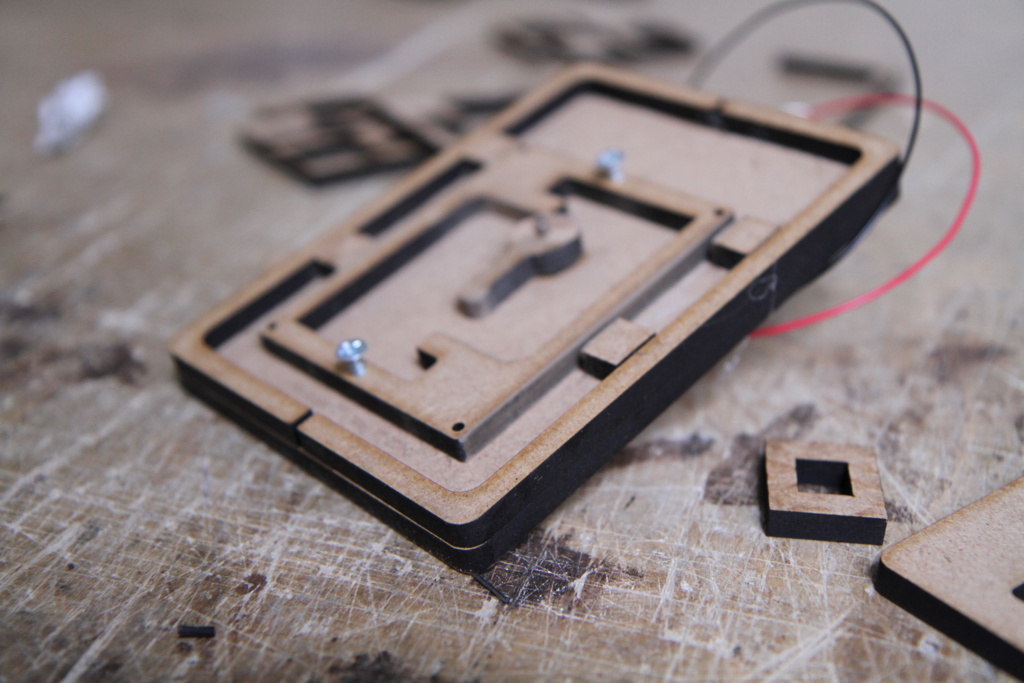
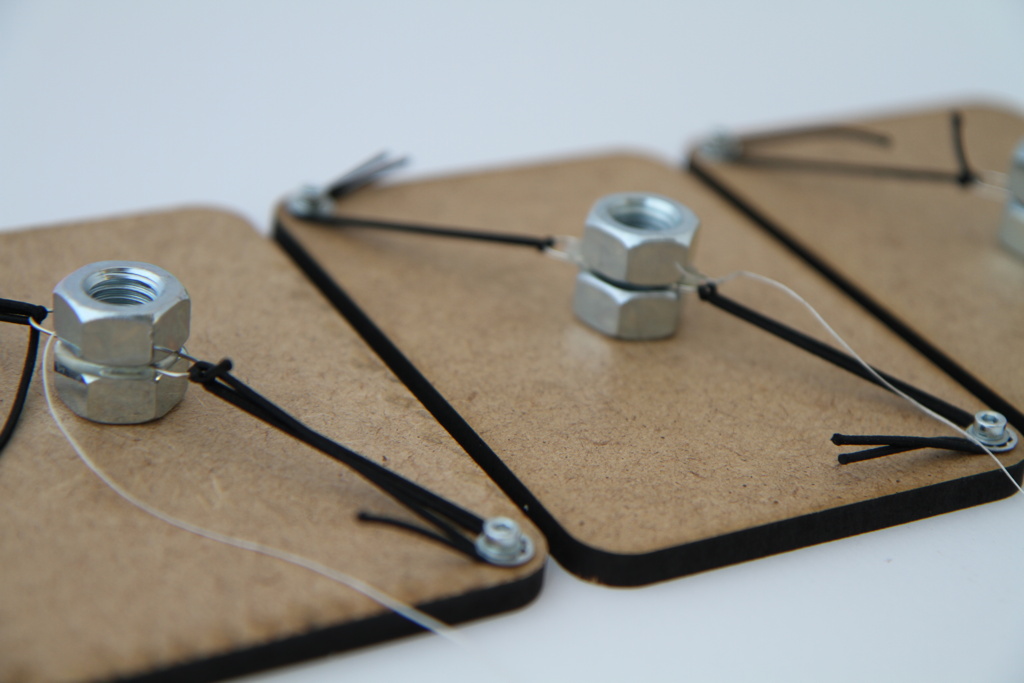
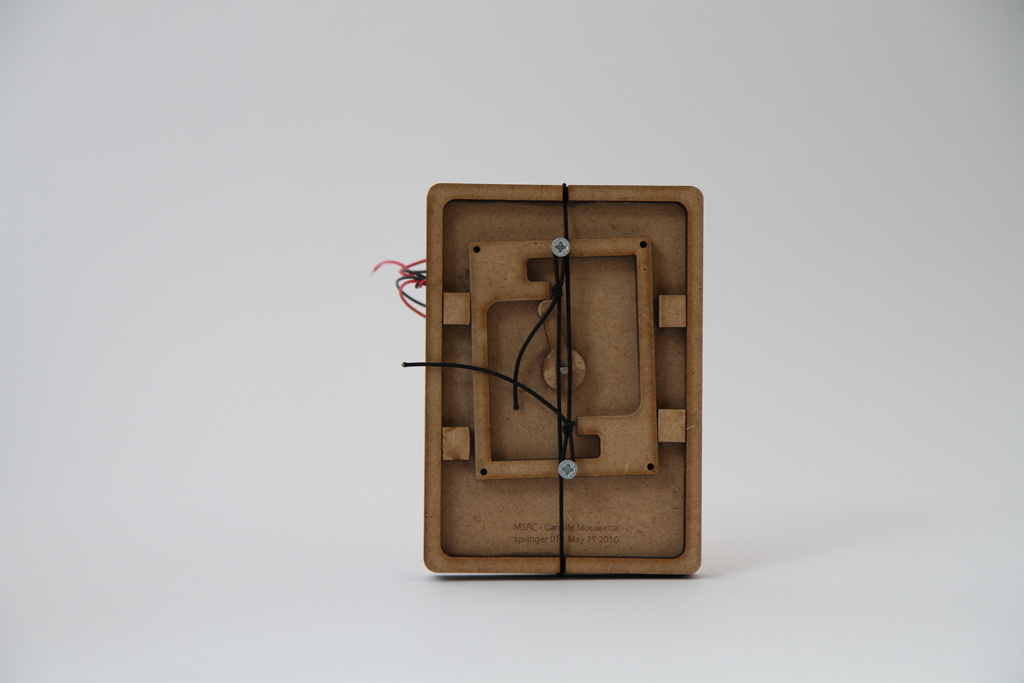
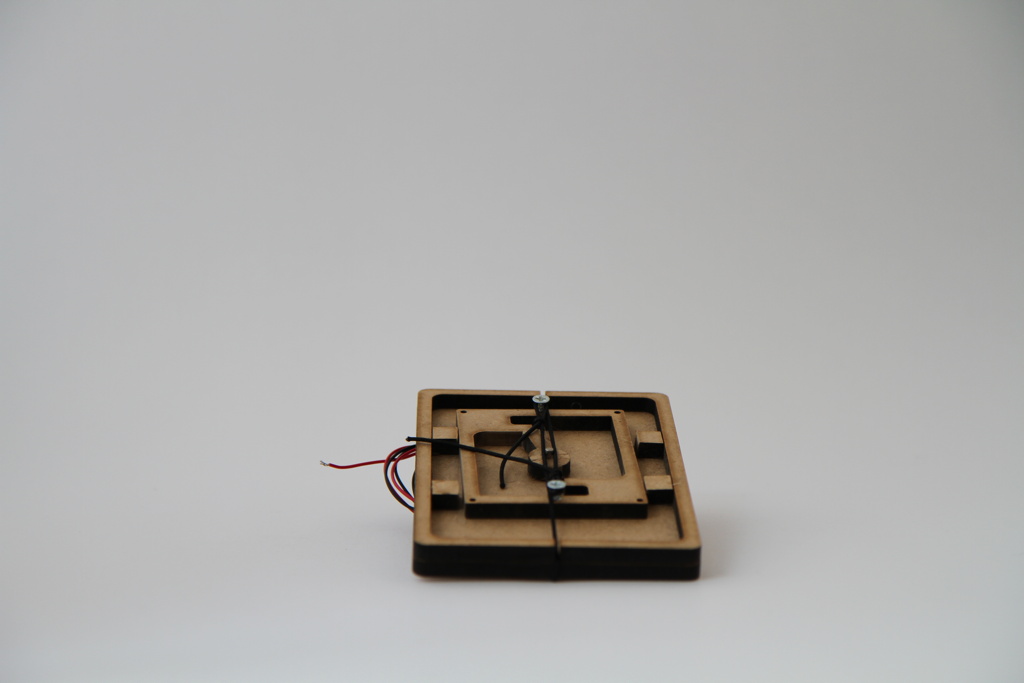
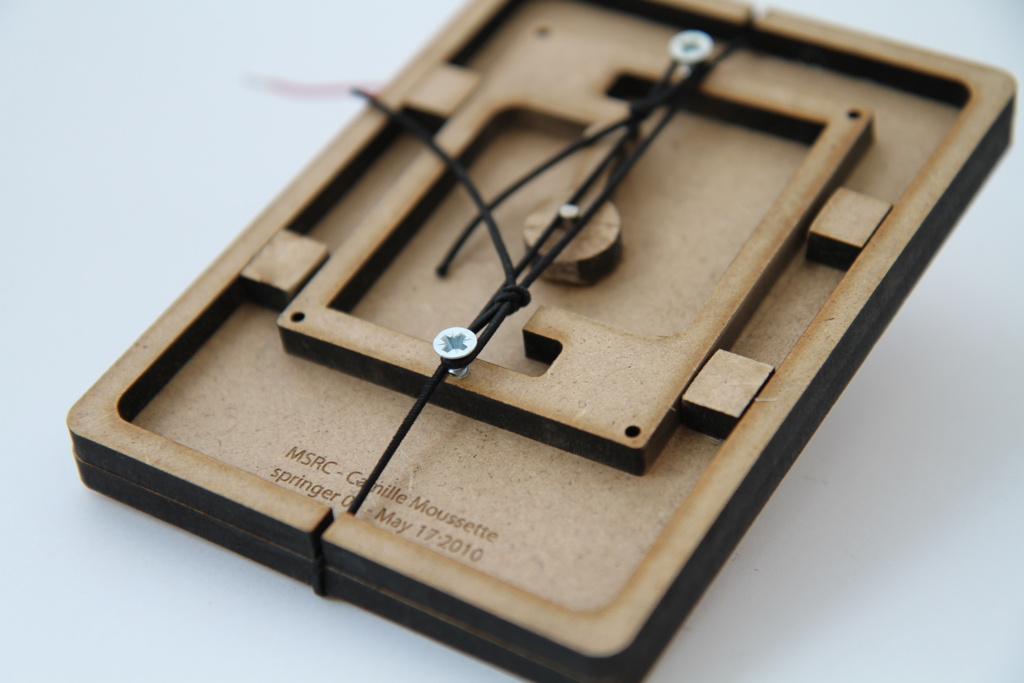
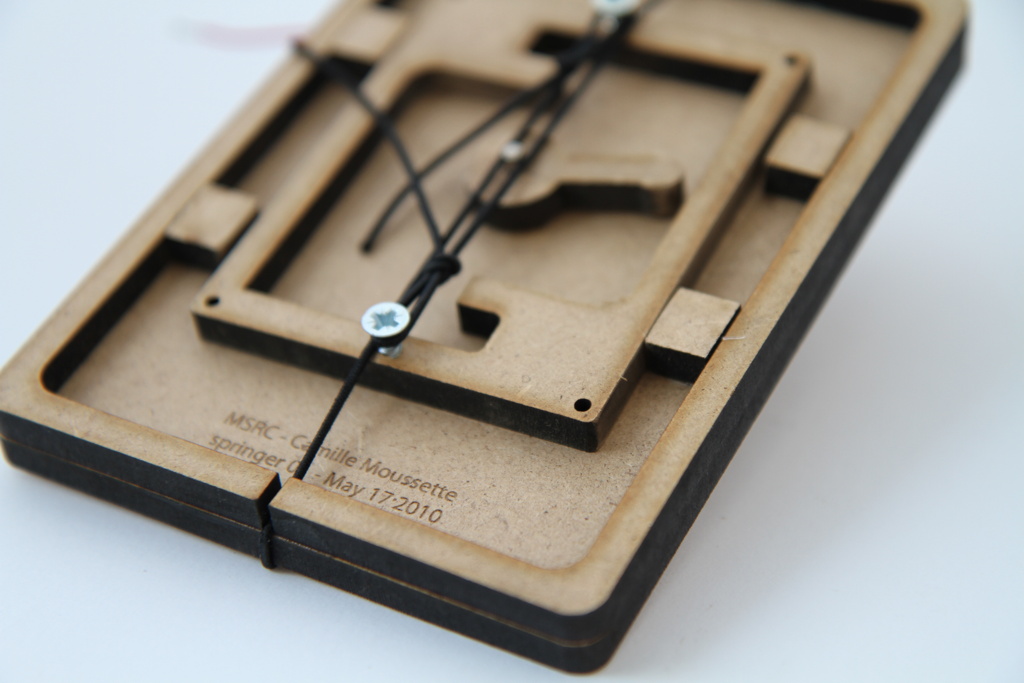
Springer 01

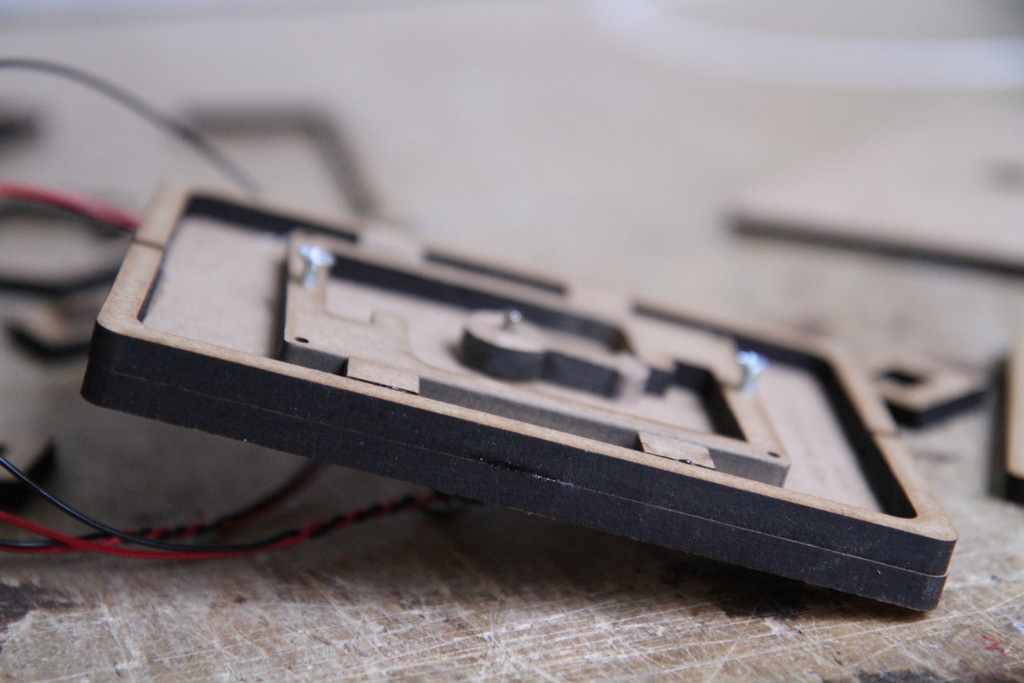
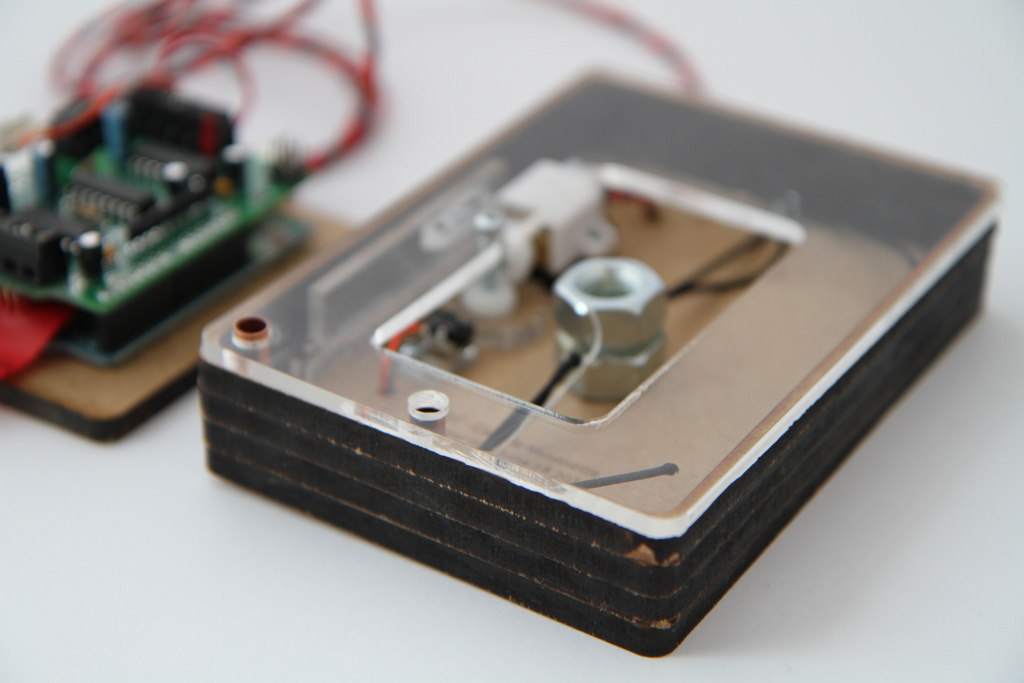
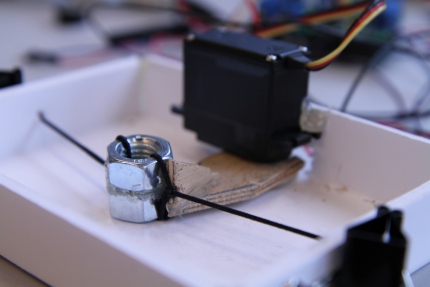
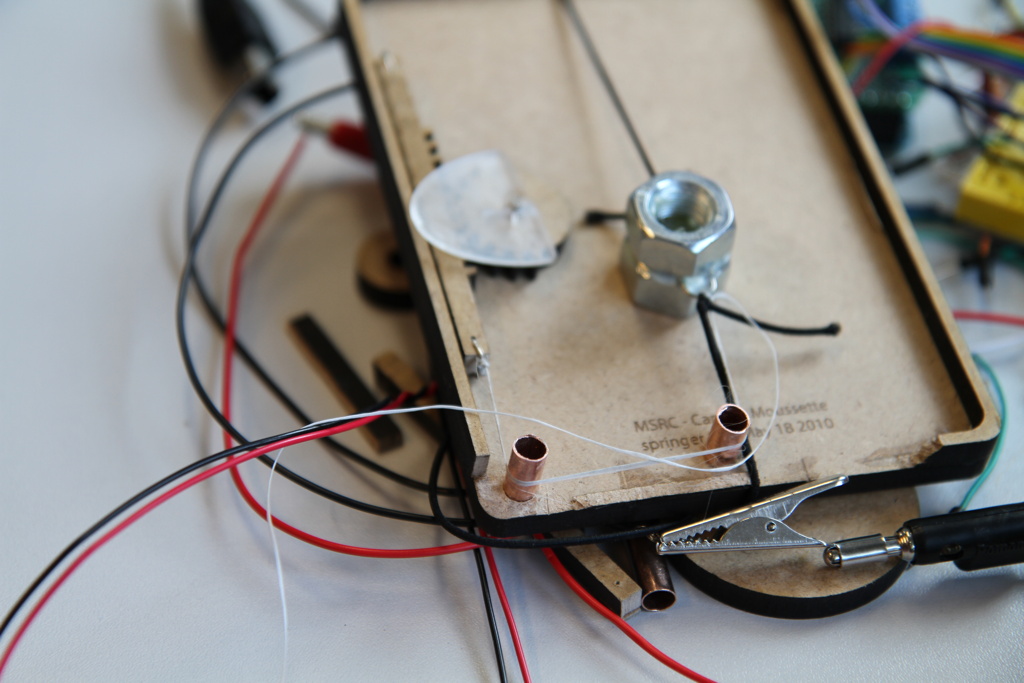
This first iteration is inspired by a classic stamping mechanism, using in the old days for punching and stamping metal parts. It is based on a rotational movement ramping along a cam or arc. On the picture above, you see the failed configuration: the cam or curved ramp is too sharp or abrupt, and the clearance is not enough to allow a free springing action.
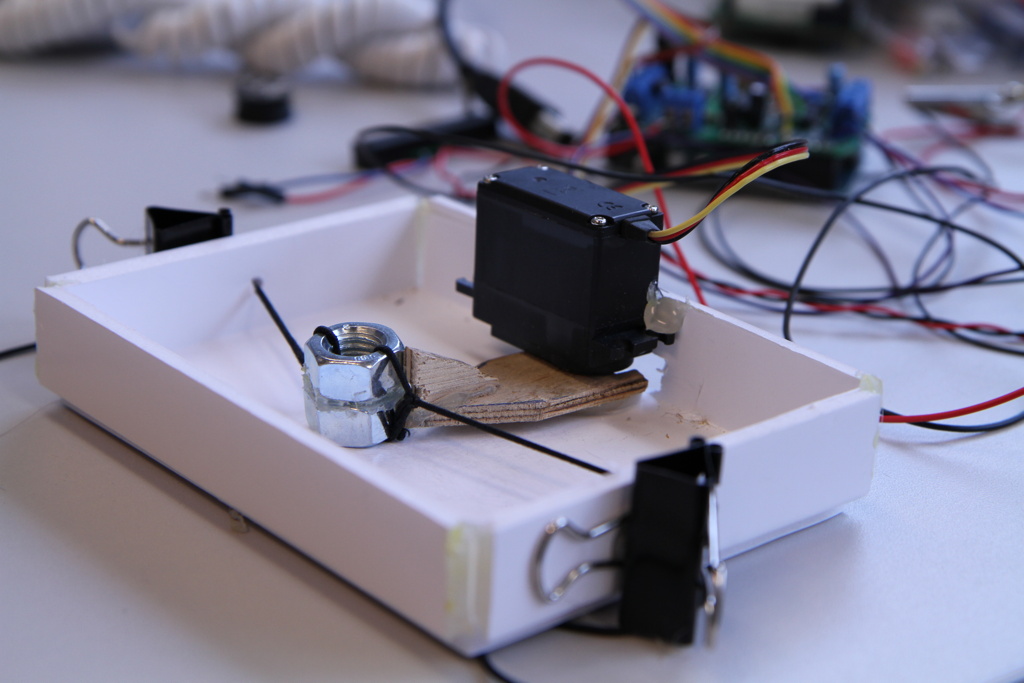
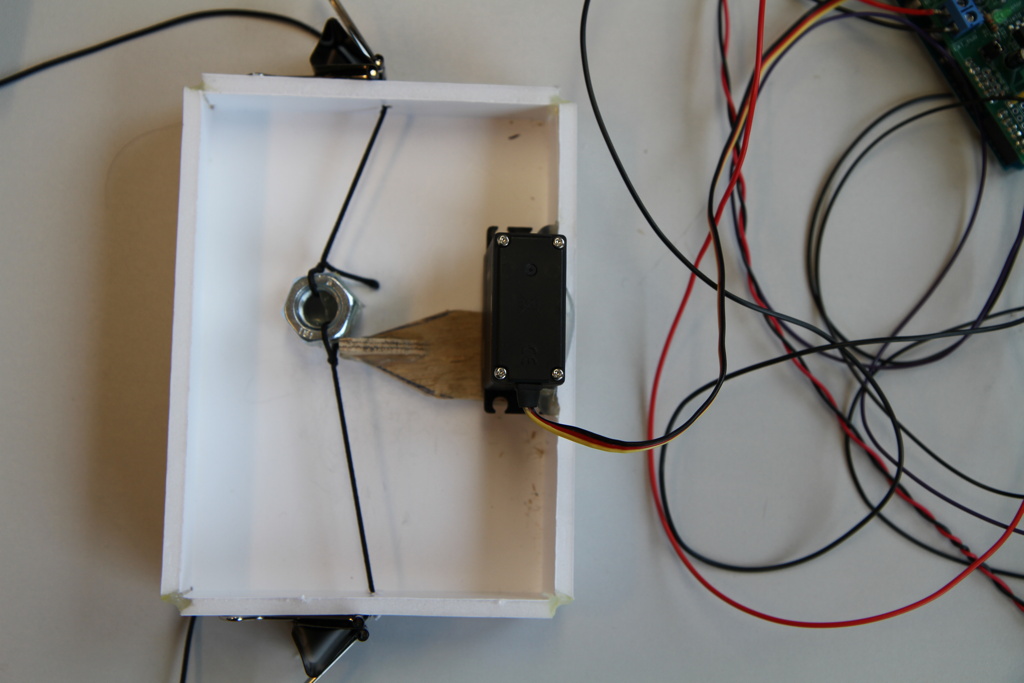
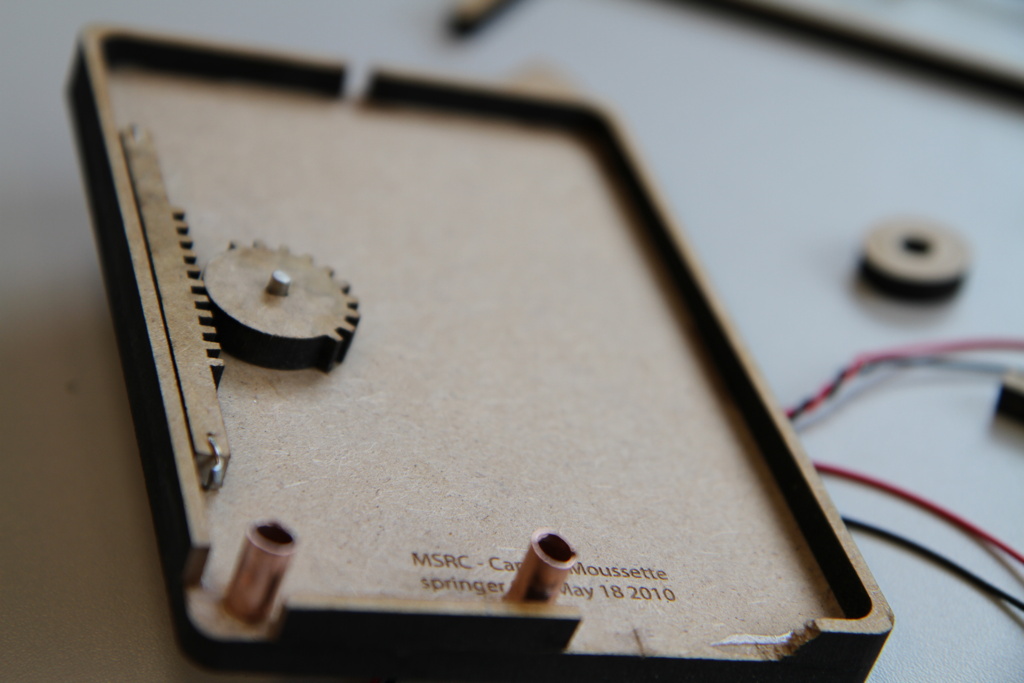
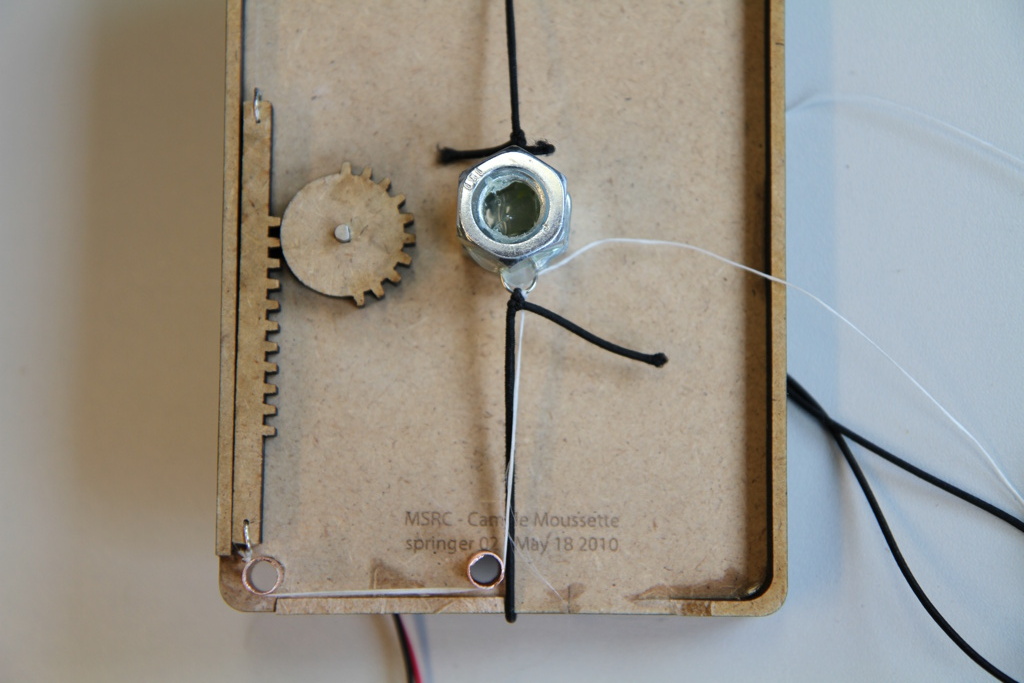
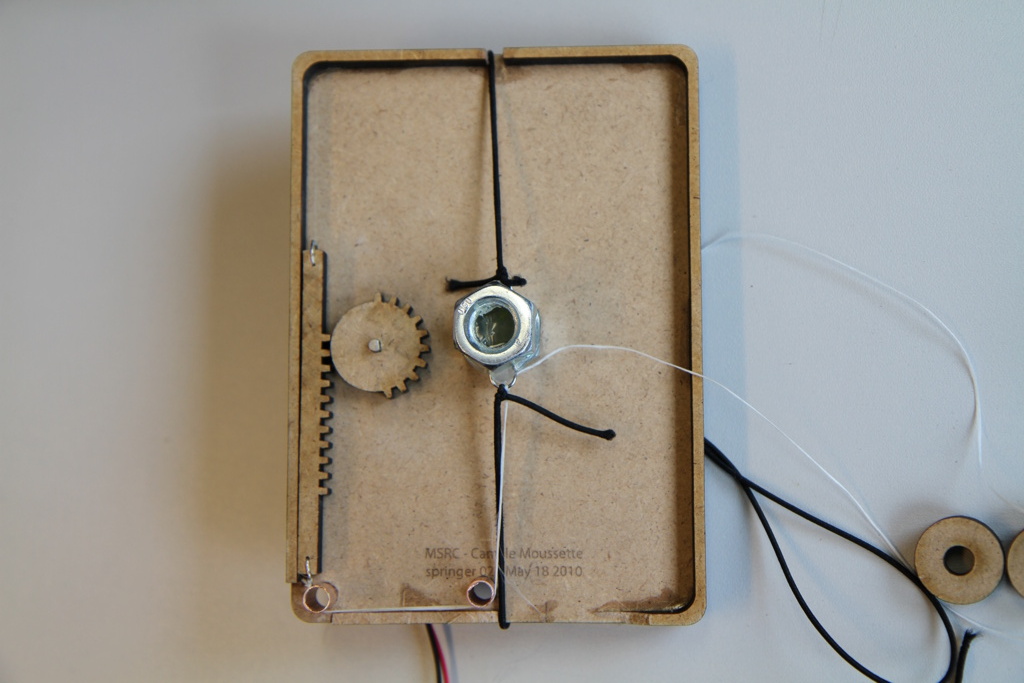
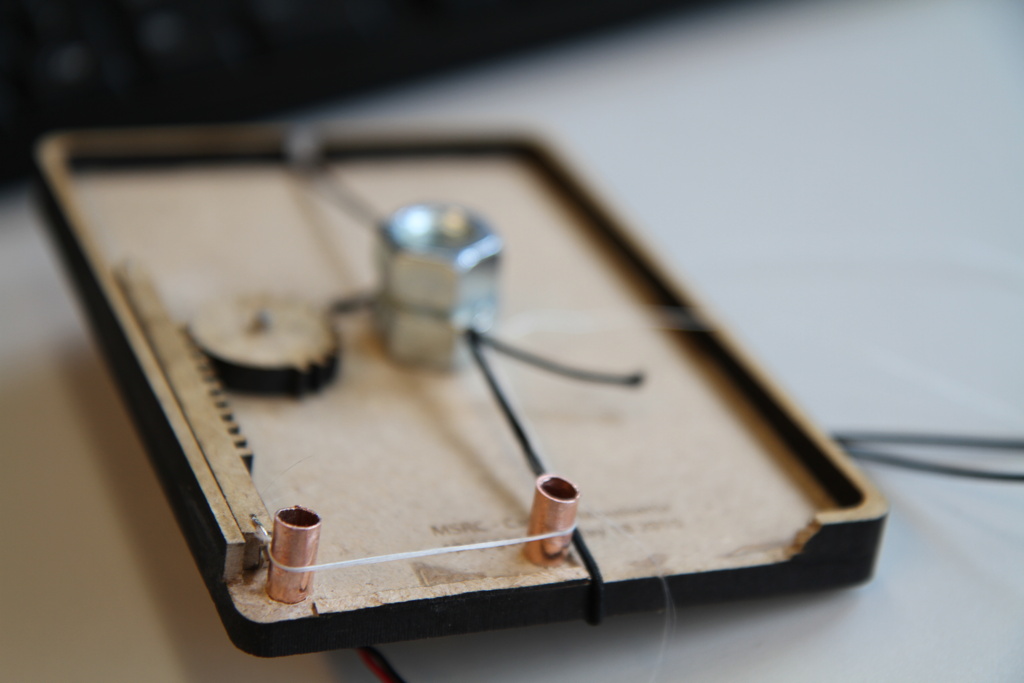
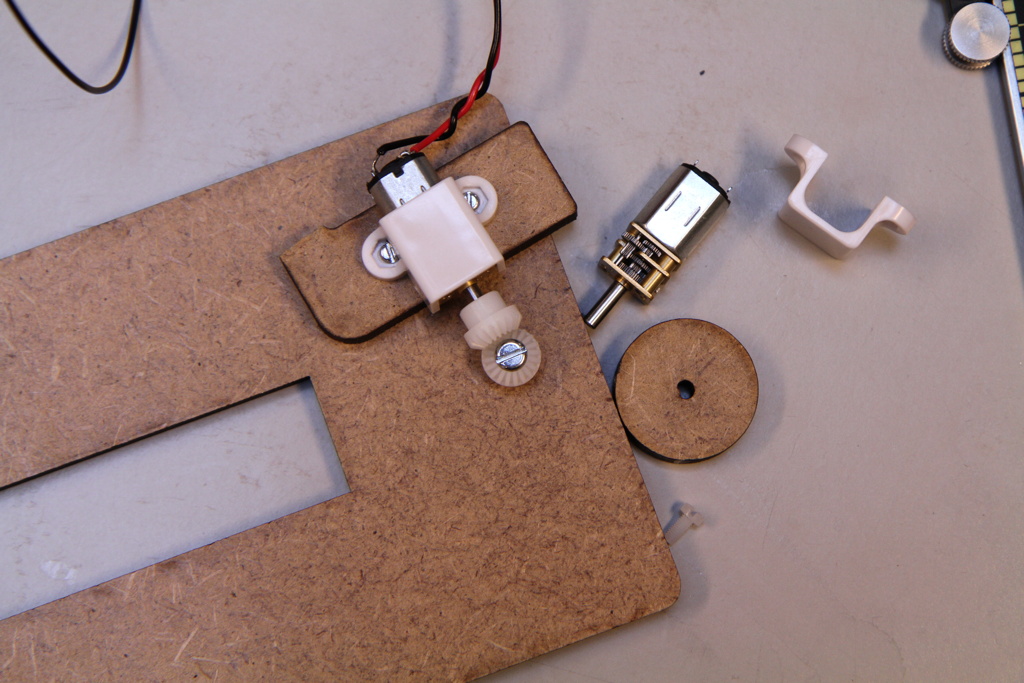
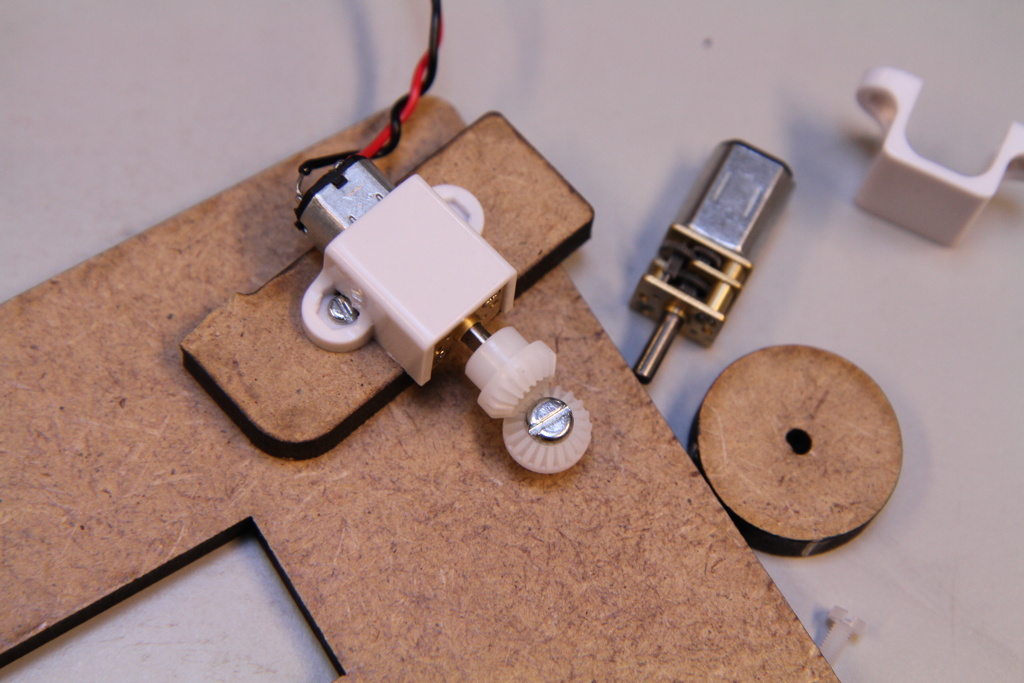
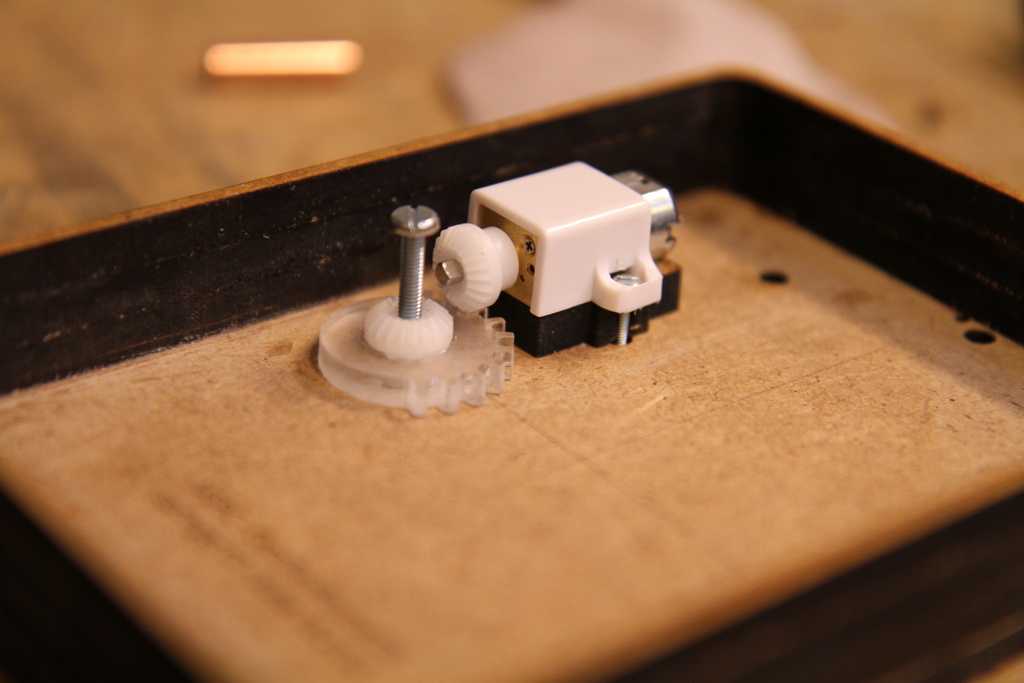
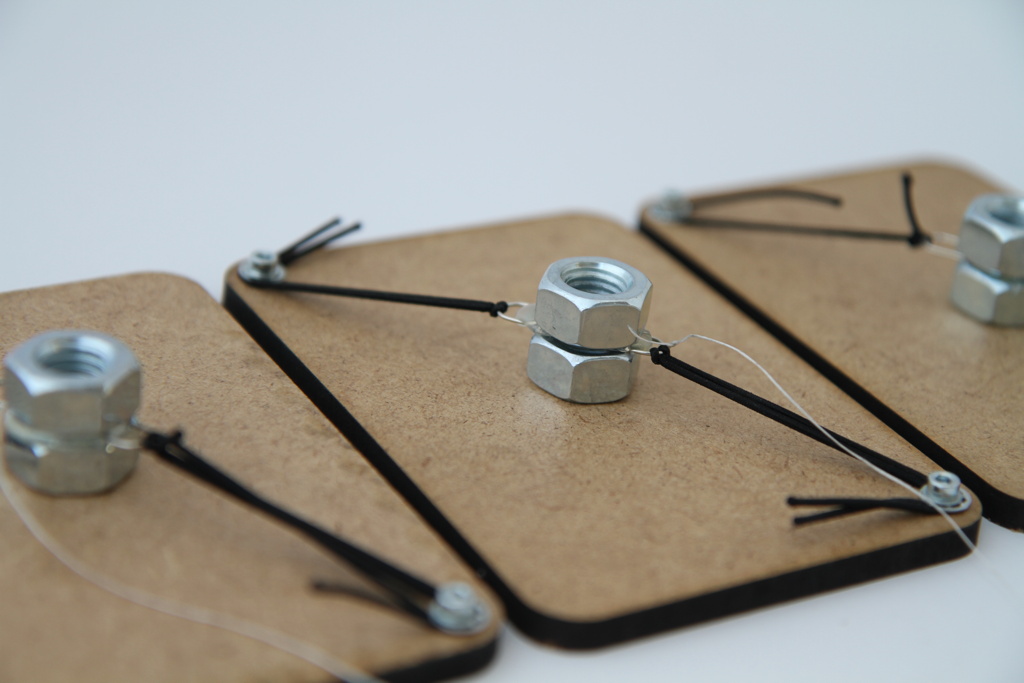
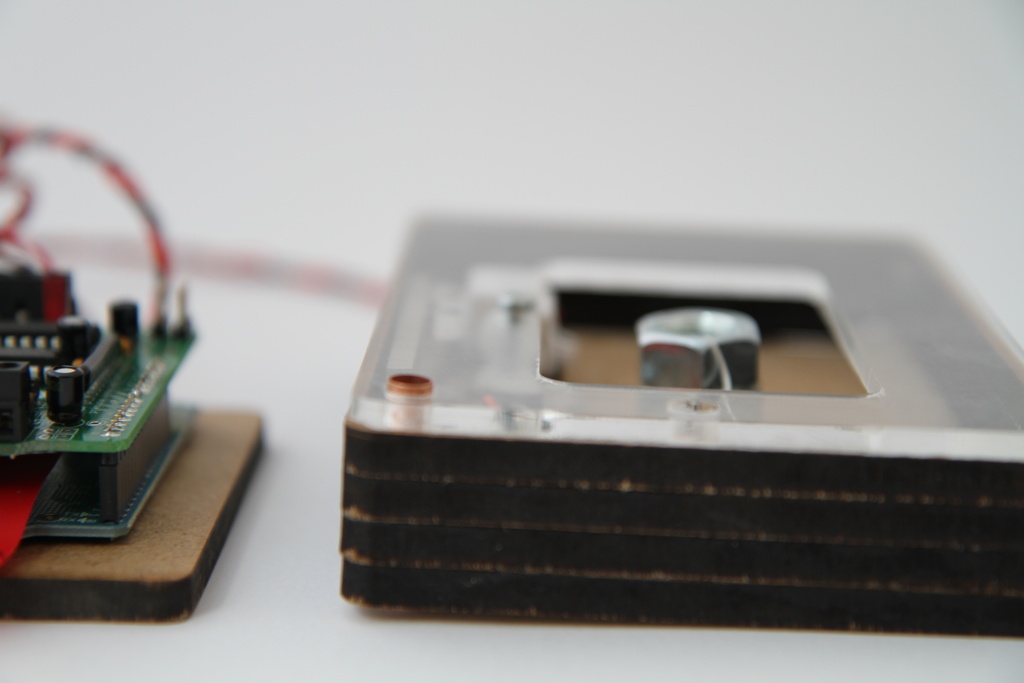
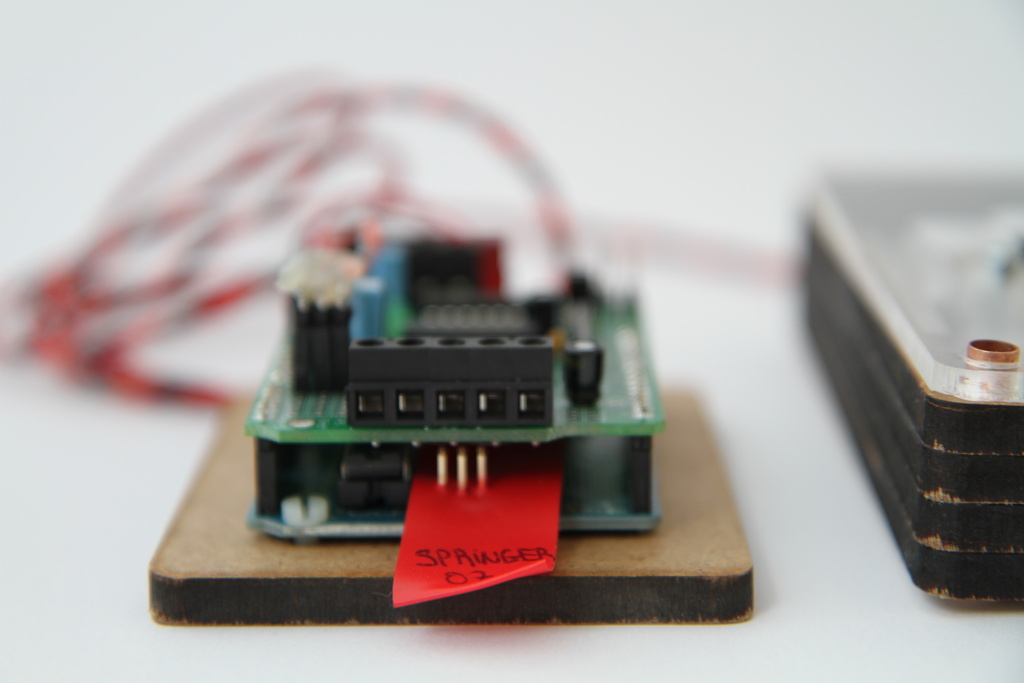
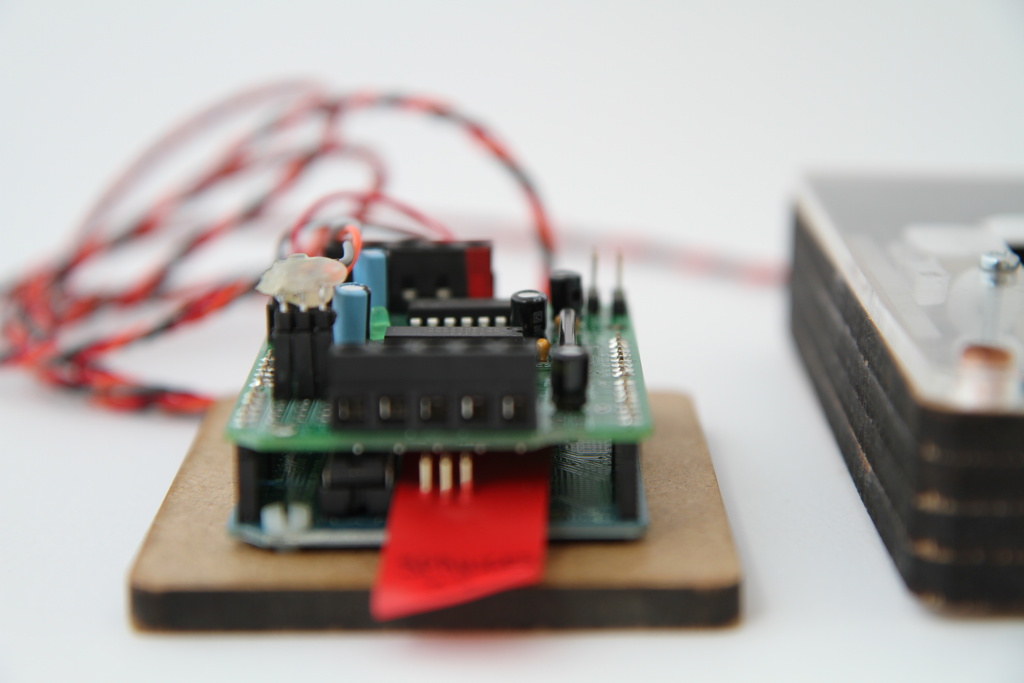
Springer 02 - 06
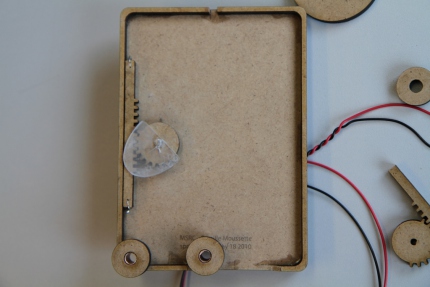
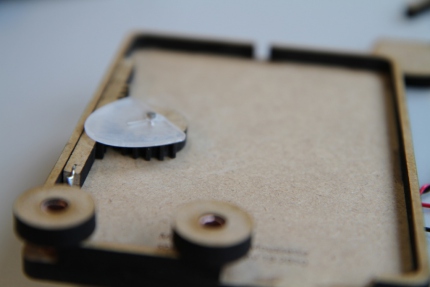

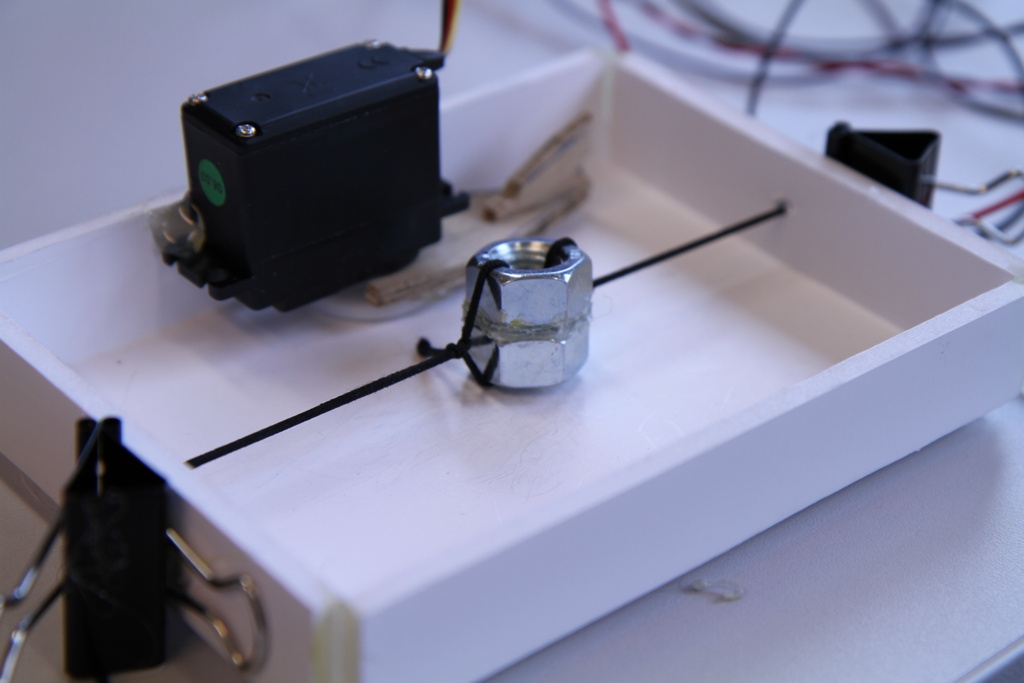
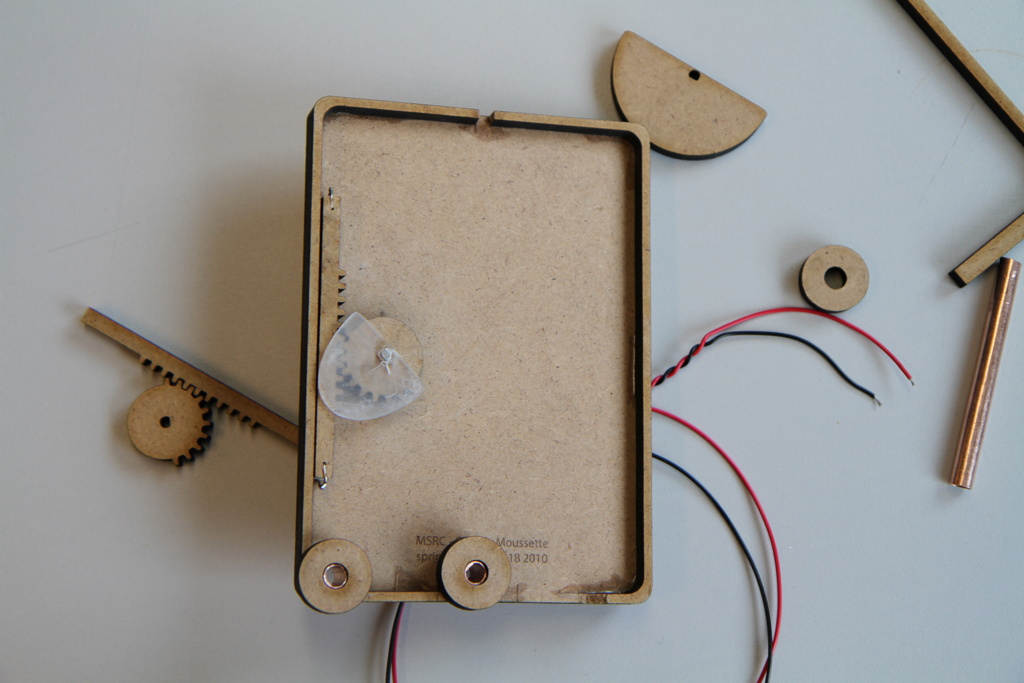
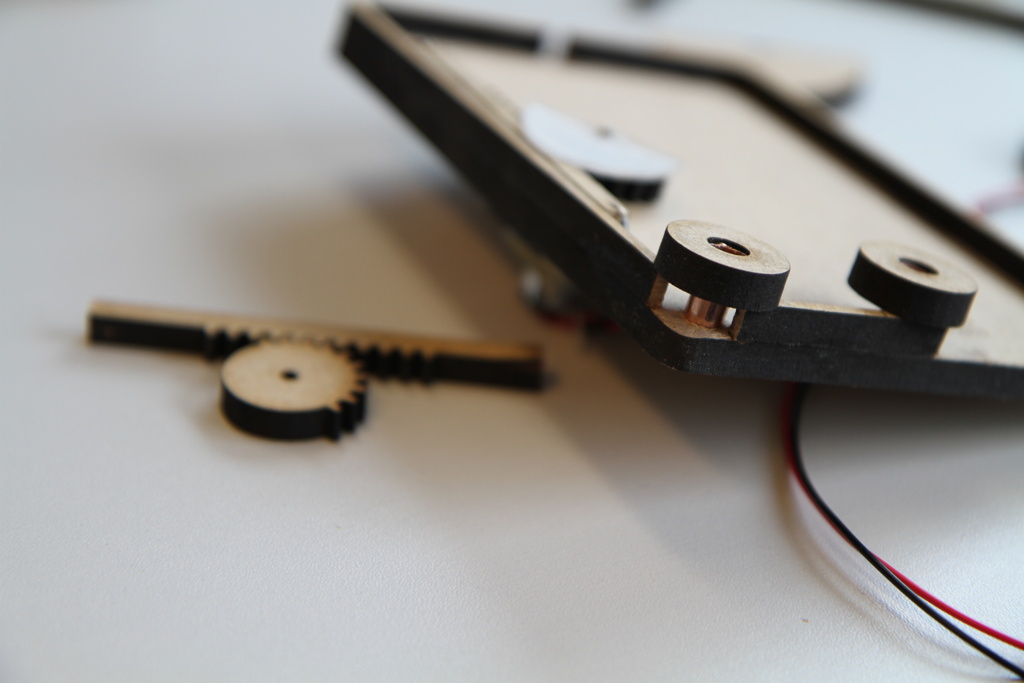
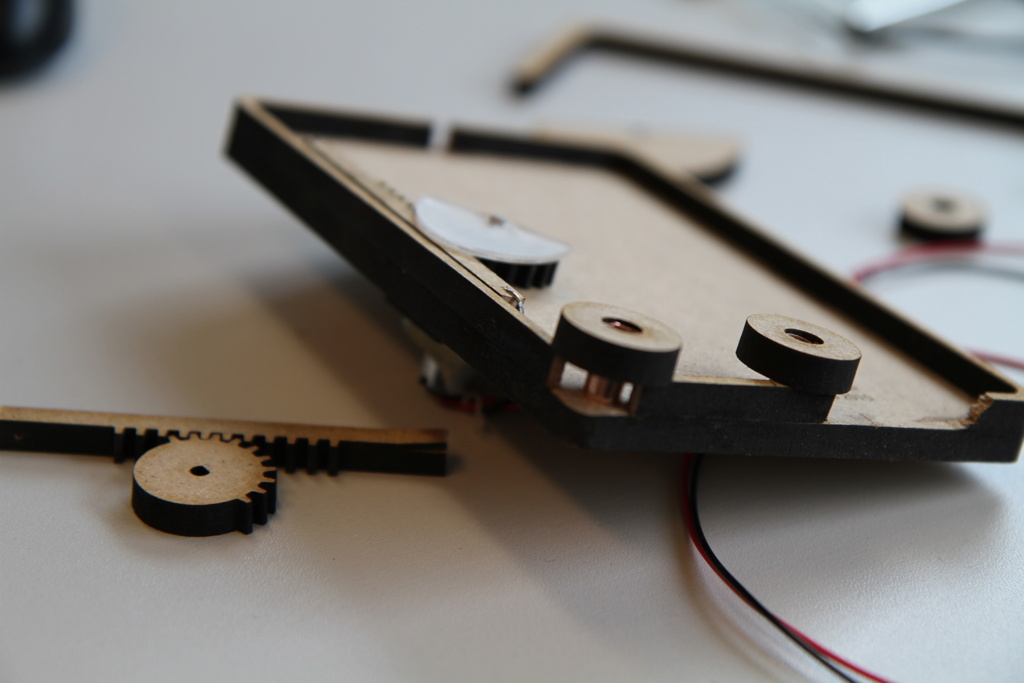
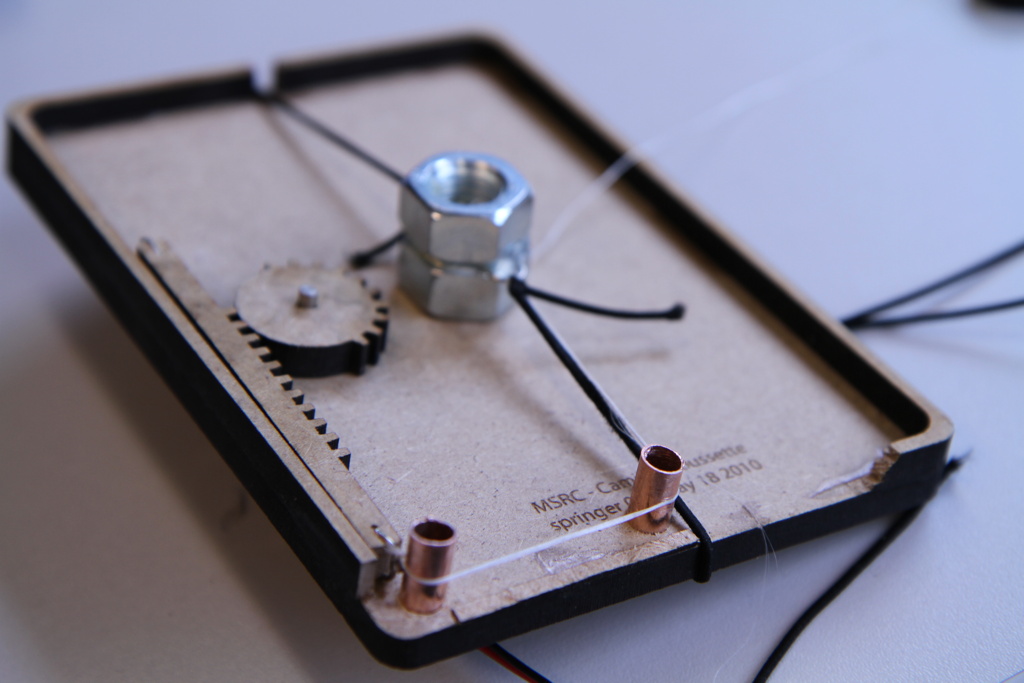
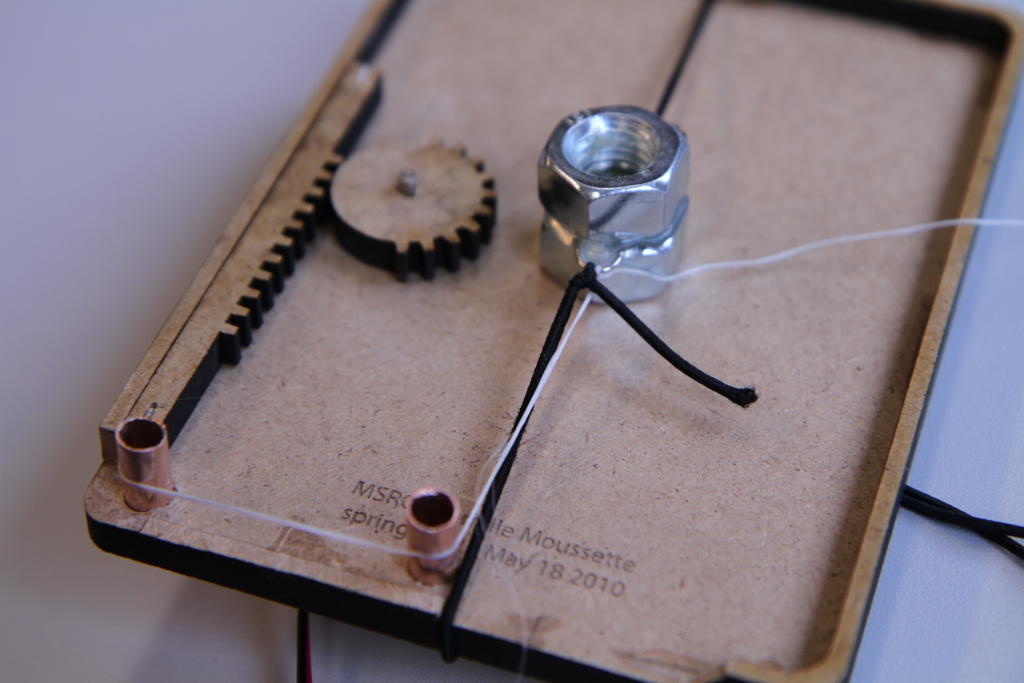
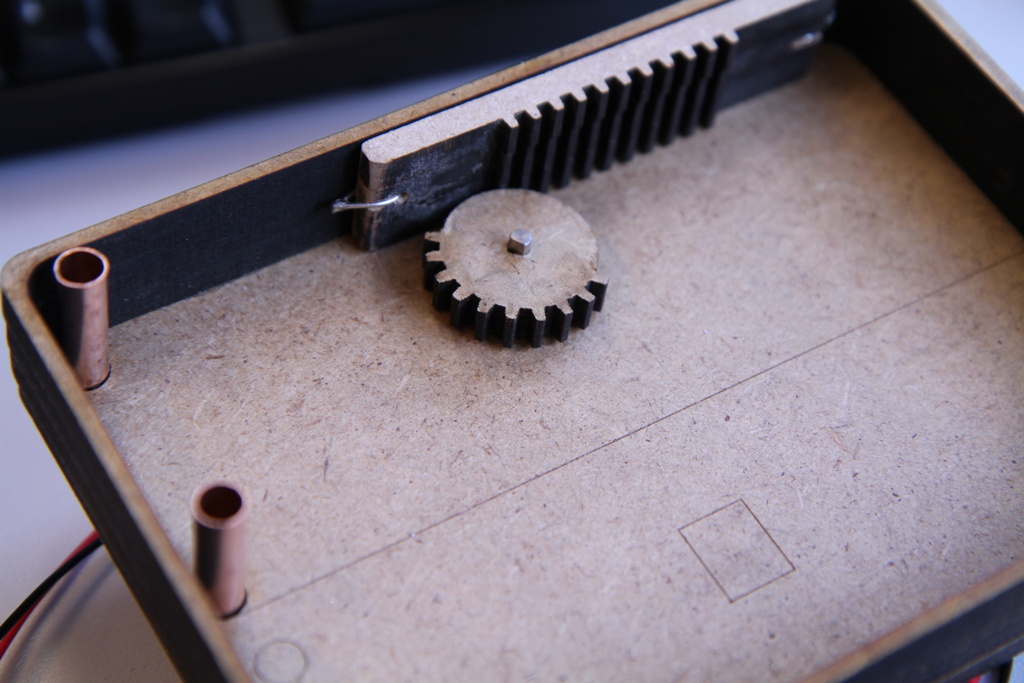
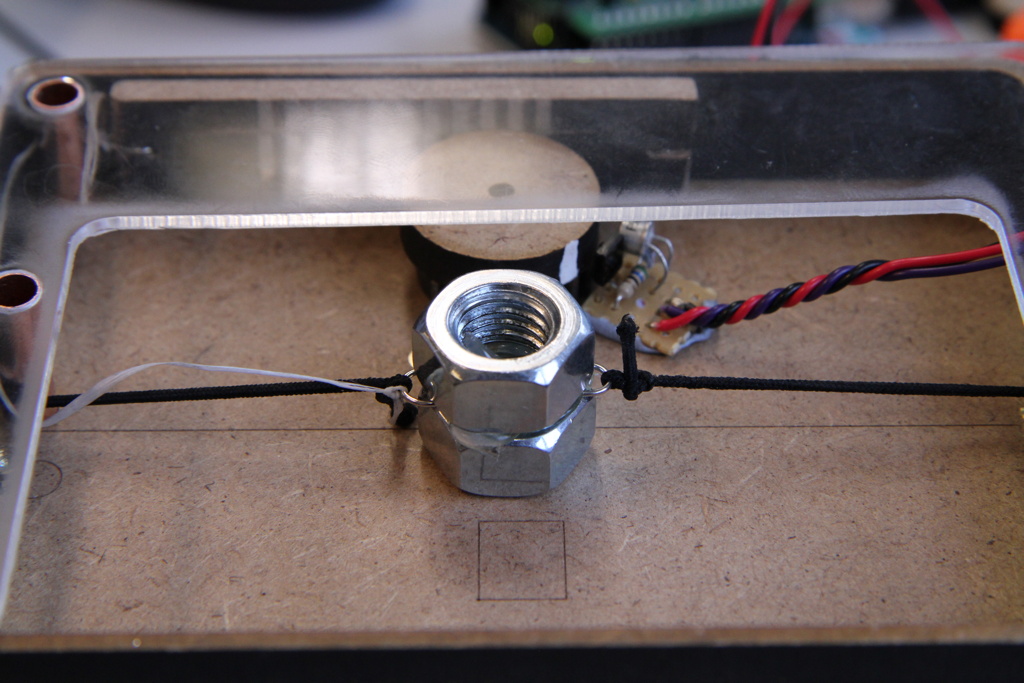
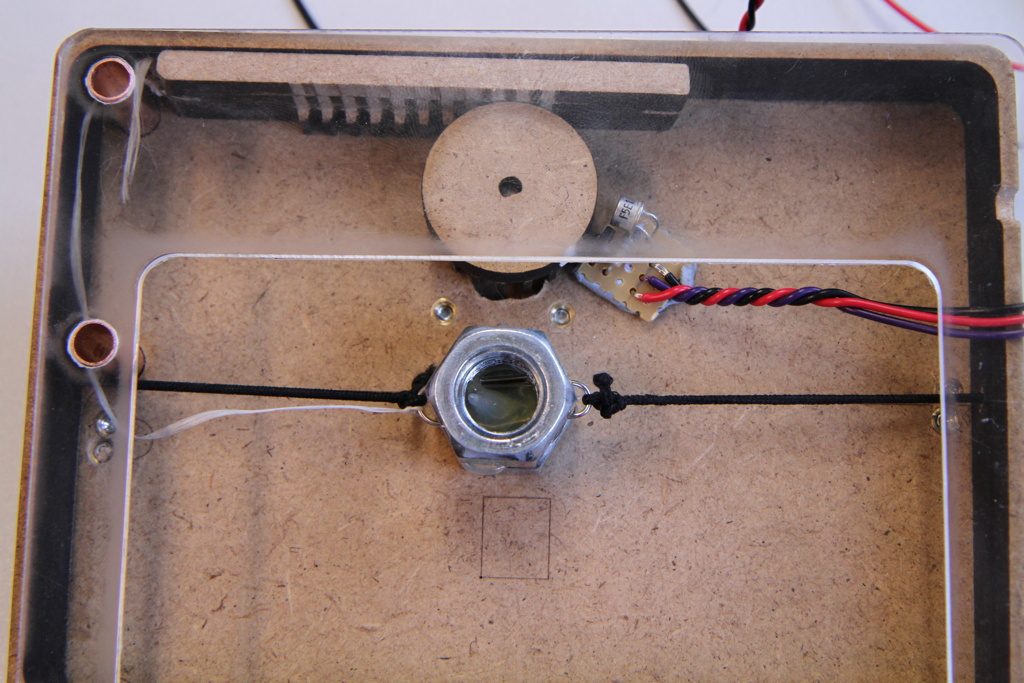
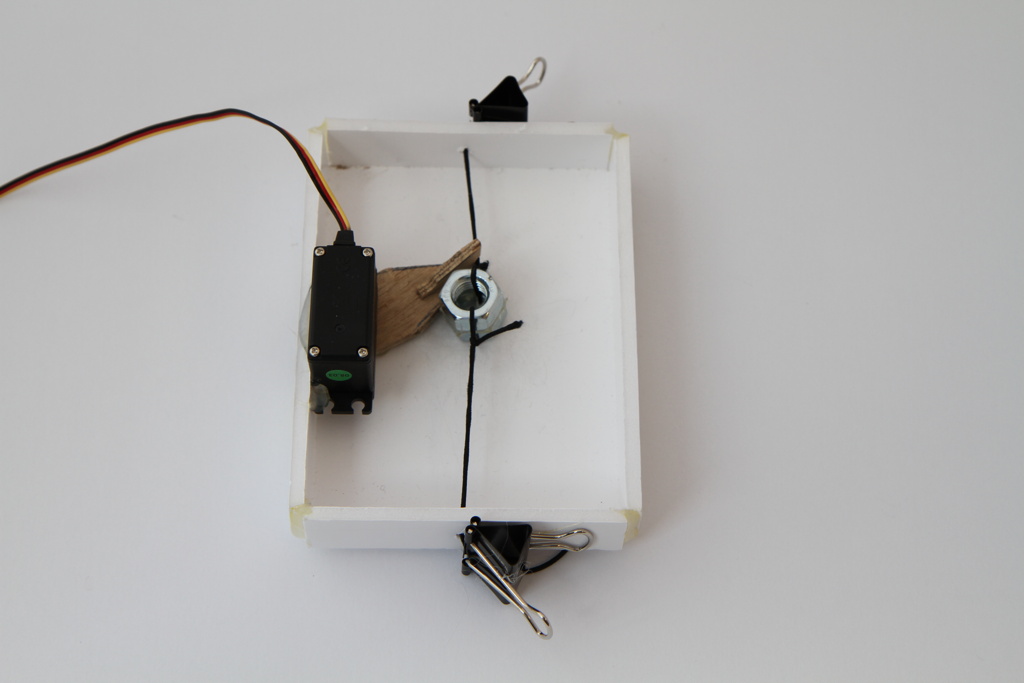
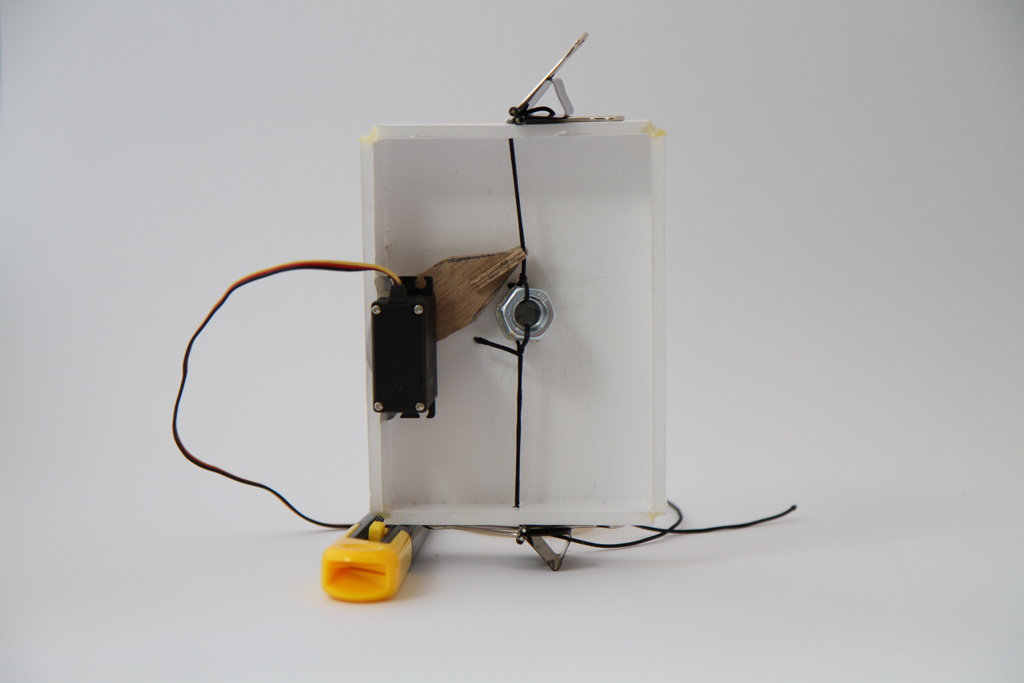
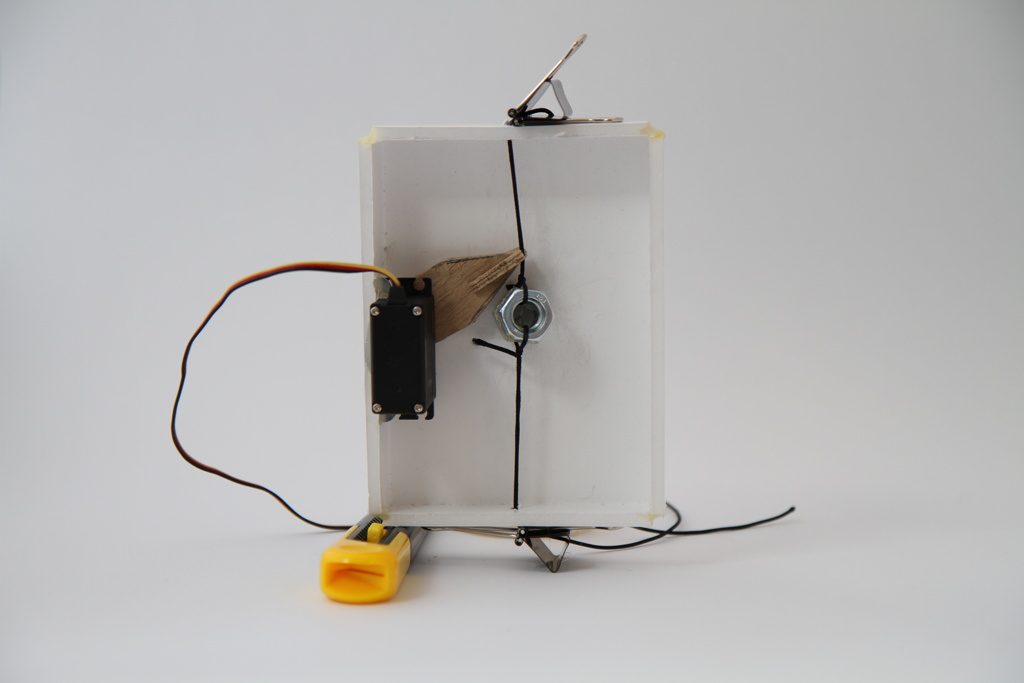
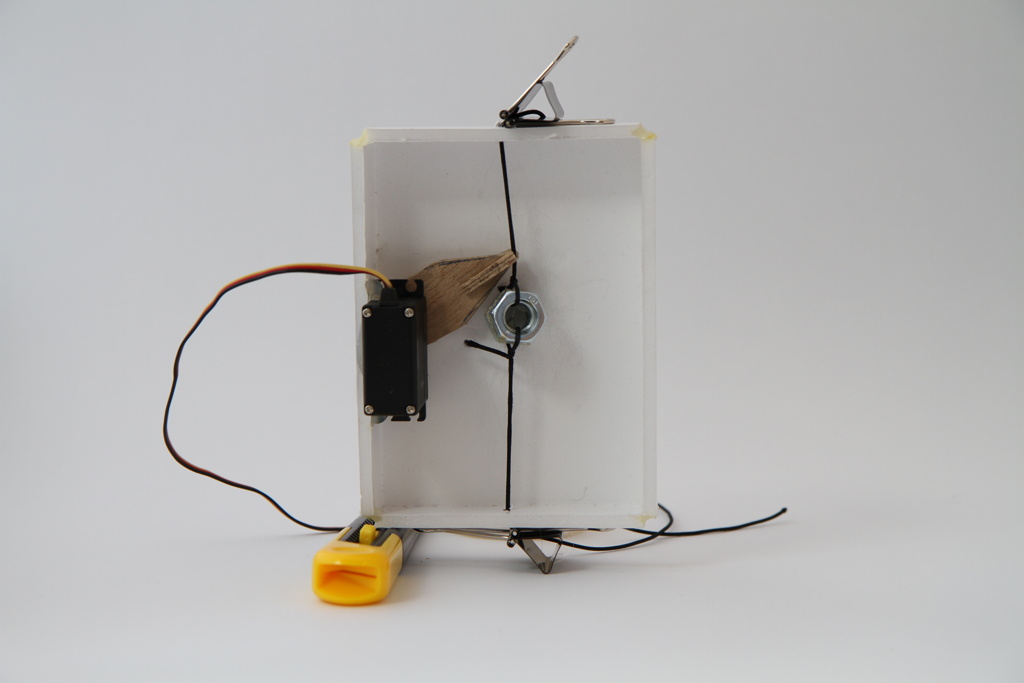
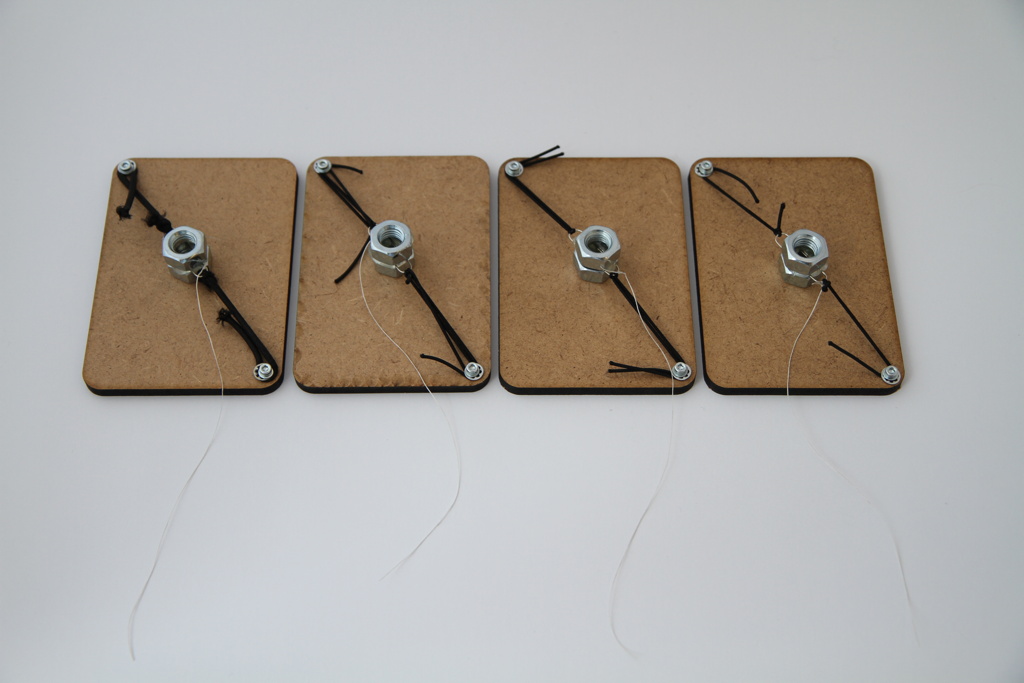
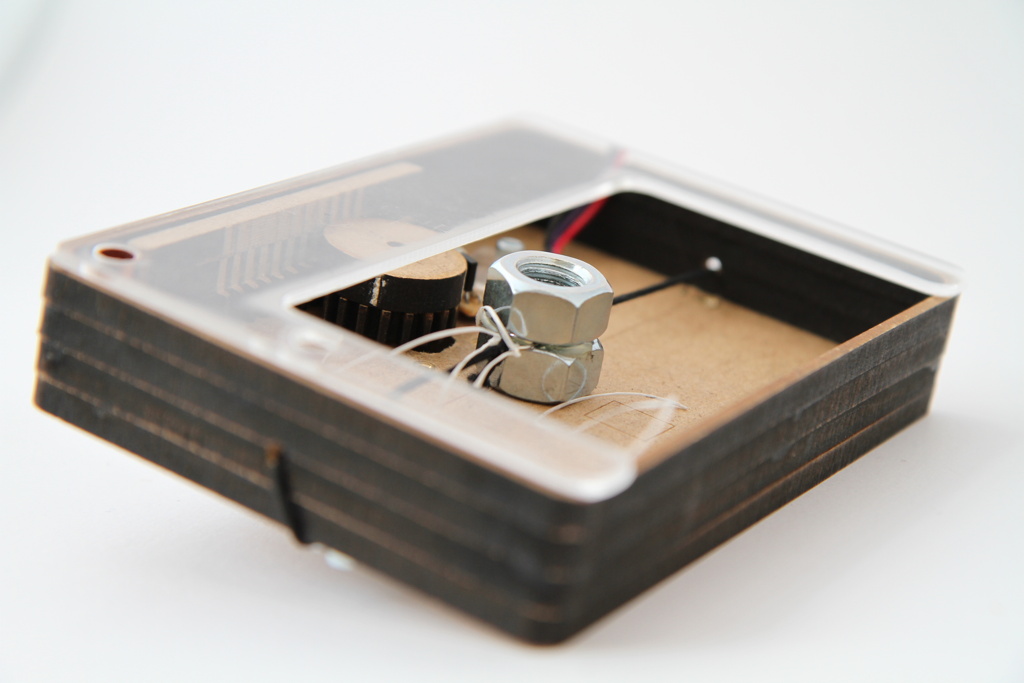
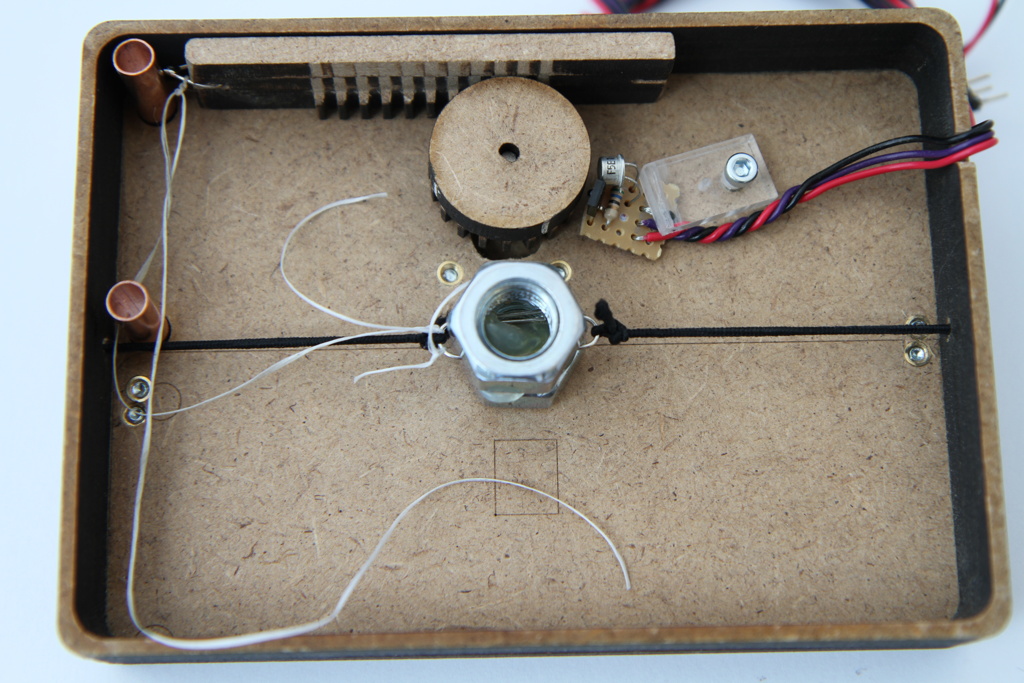
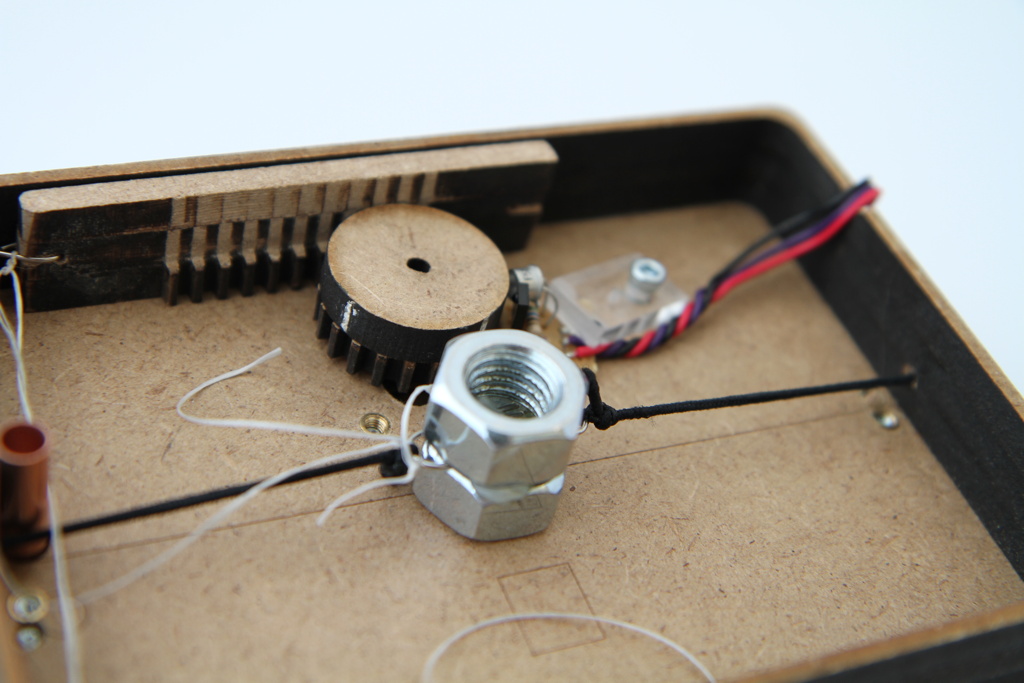
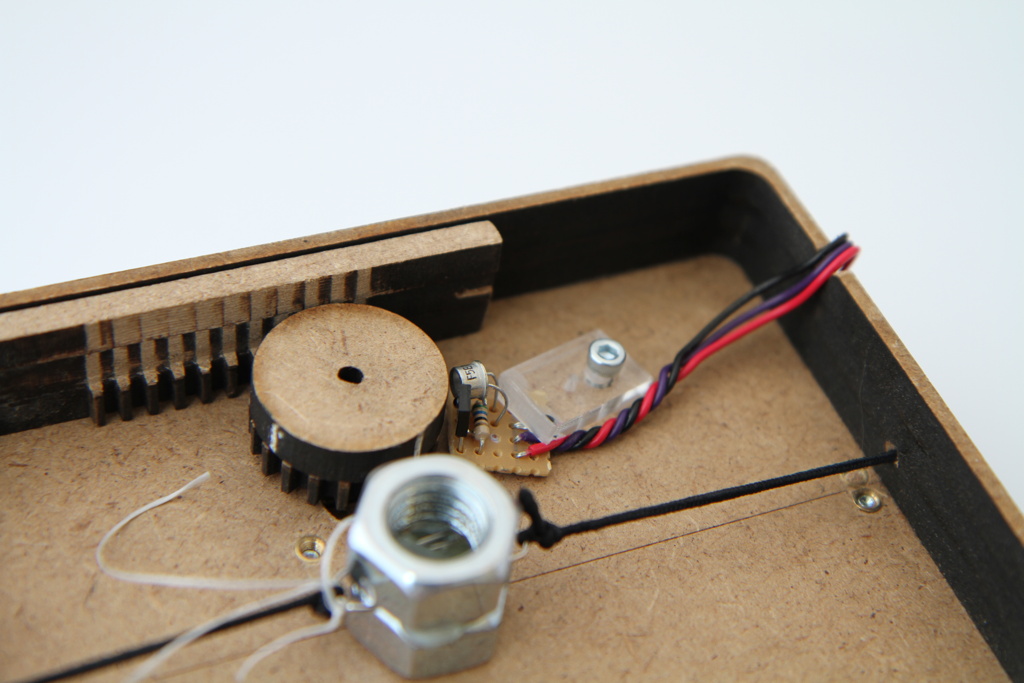
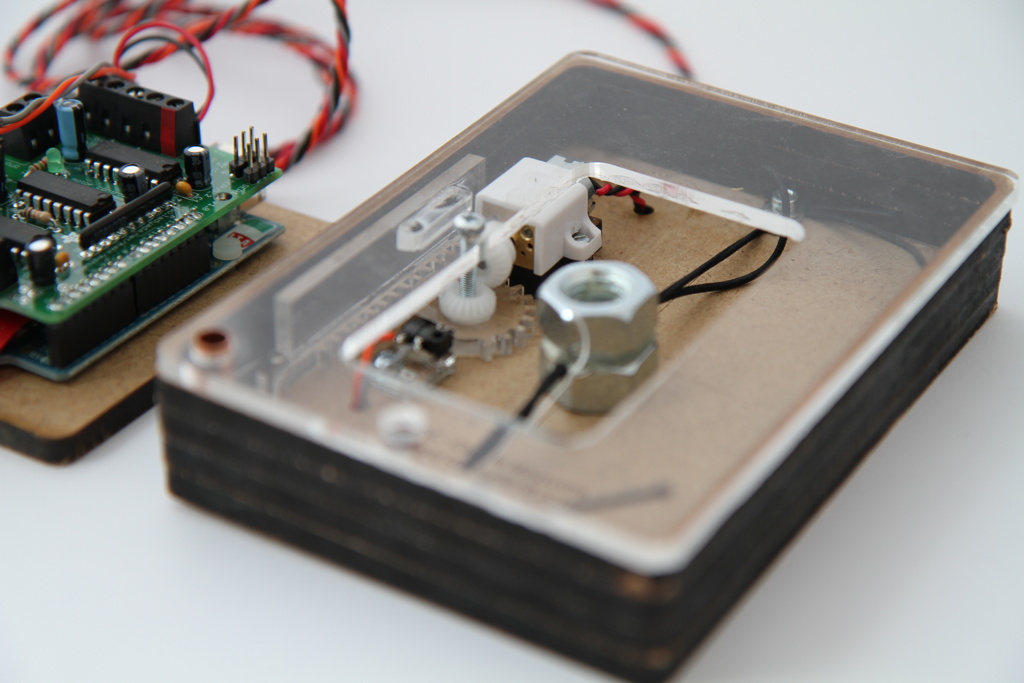
The following iterations were made using a half-geared wheel. Coupled with a retention spring, it provides a simple crank and release mechanism. I initially trid to just use time to synchronize the crank action from the release action, but it was not consistent. I then switch to a infrared red (IR) light sensor. By marking the black wheel with white strips I could define and time the different actions. It was like scripting and timing with a tangible marker. It was a bit too unreliable due to the ambient light conditions.
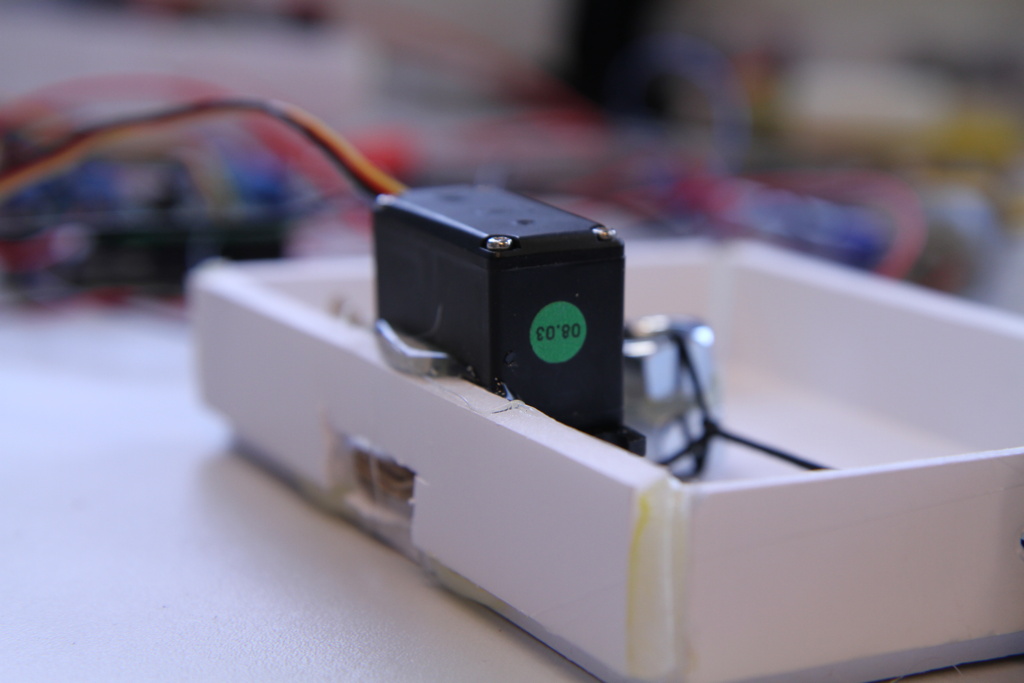
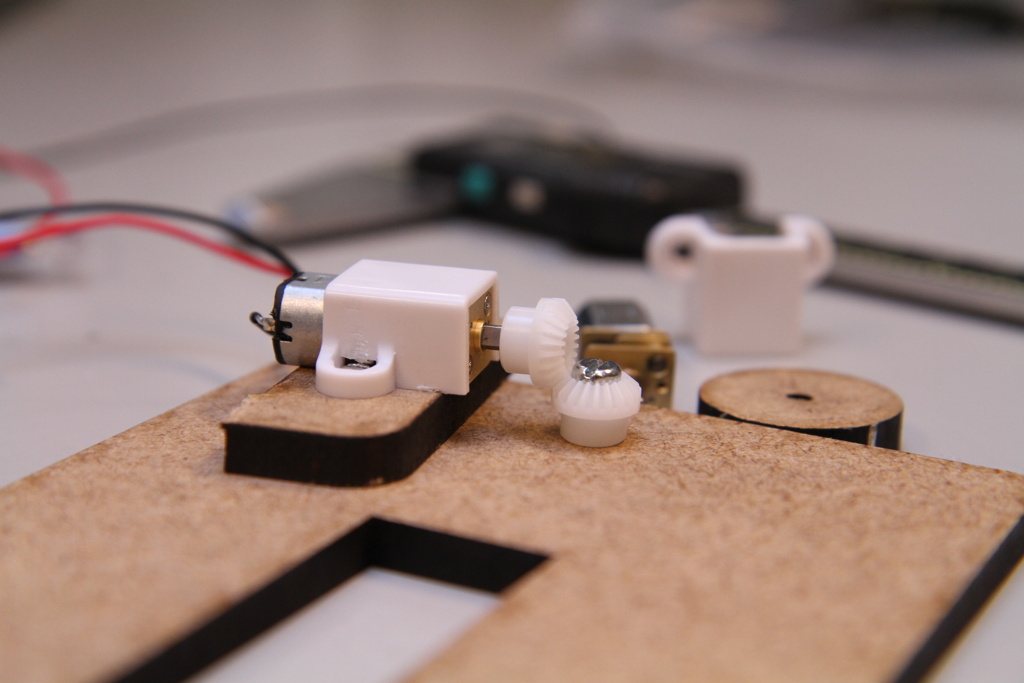
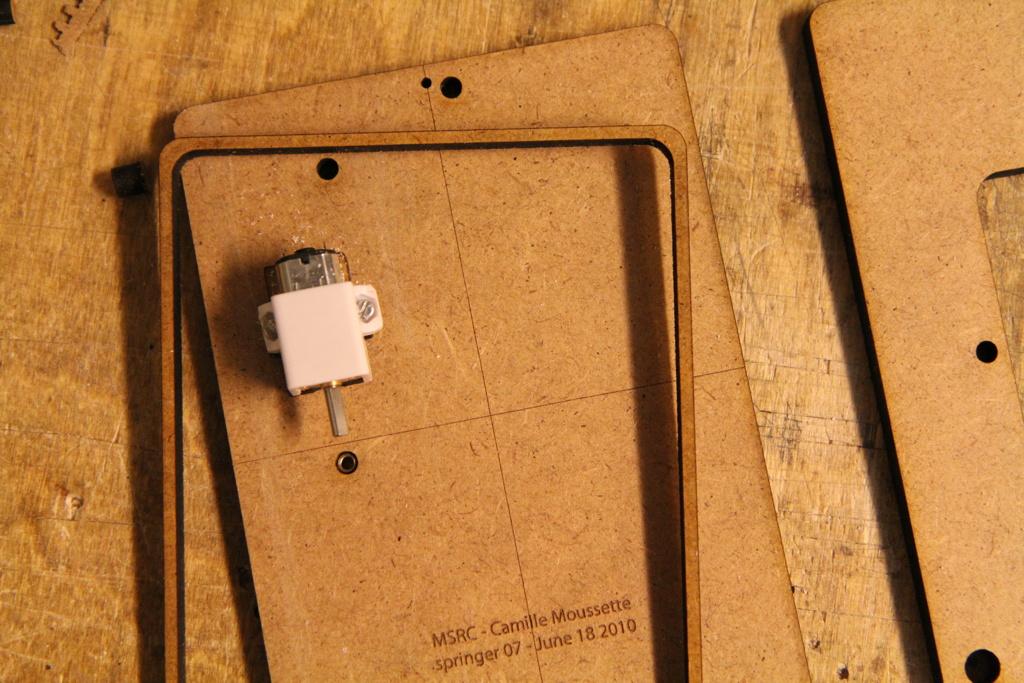
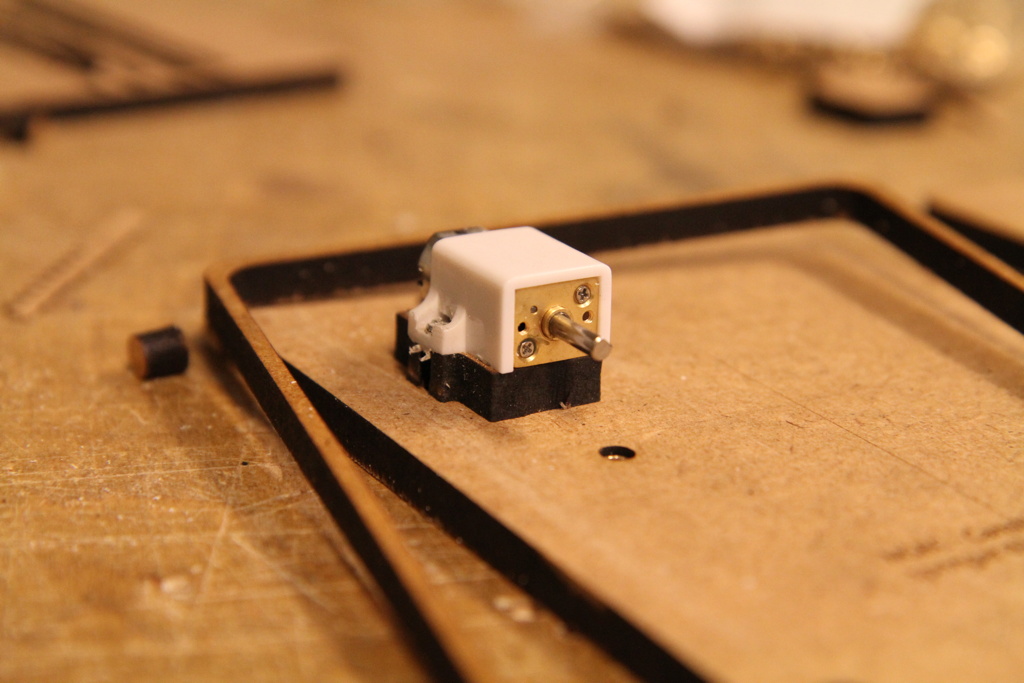
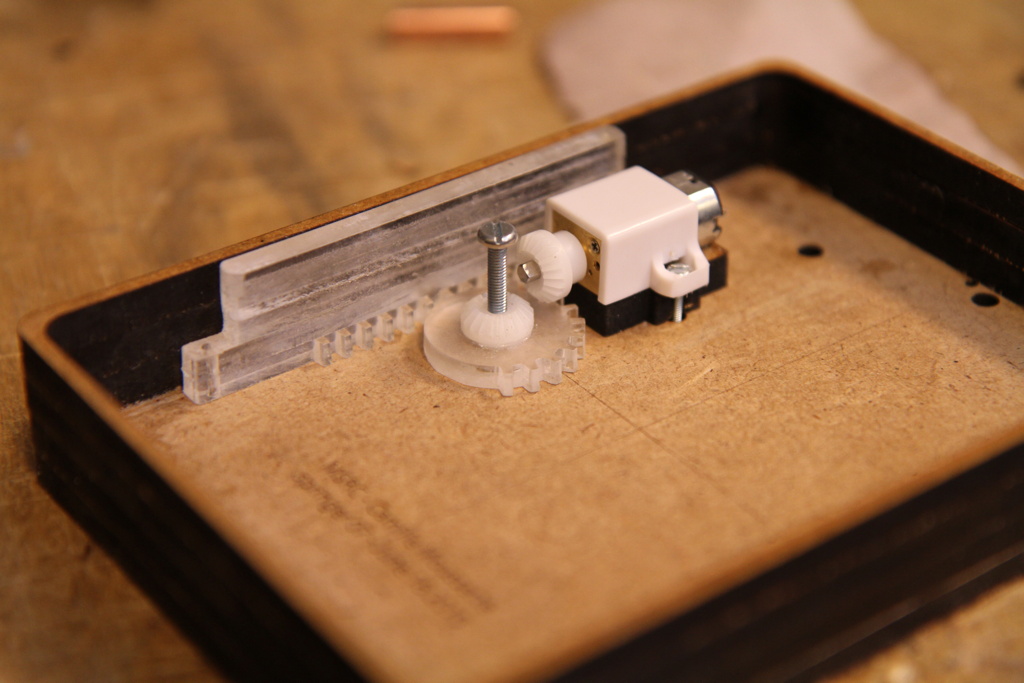
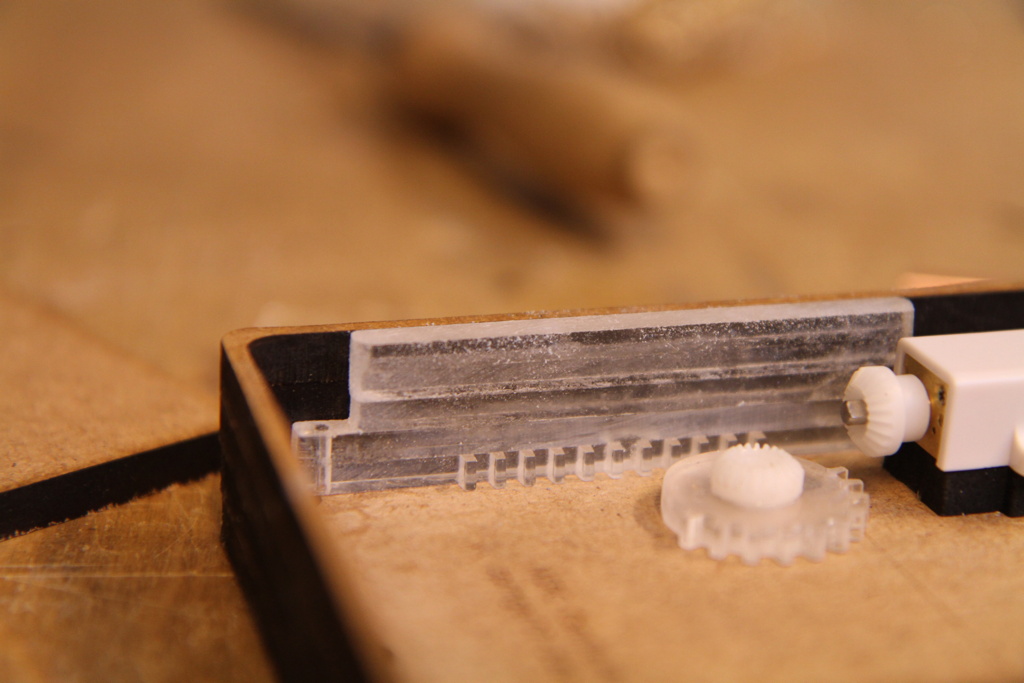
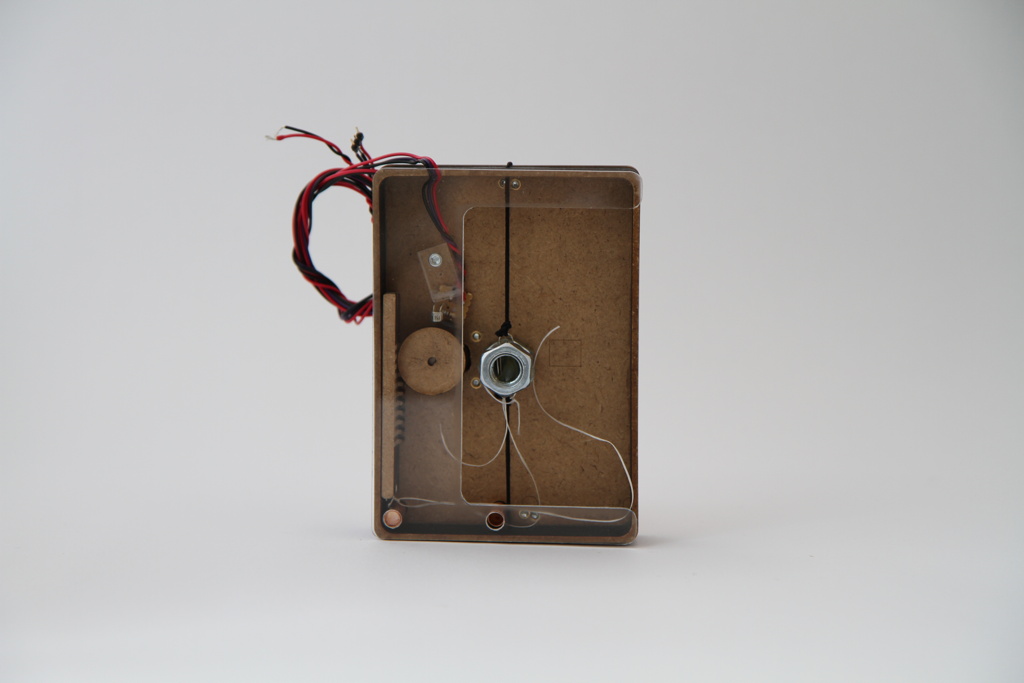
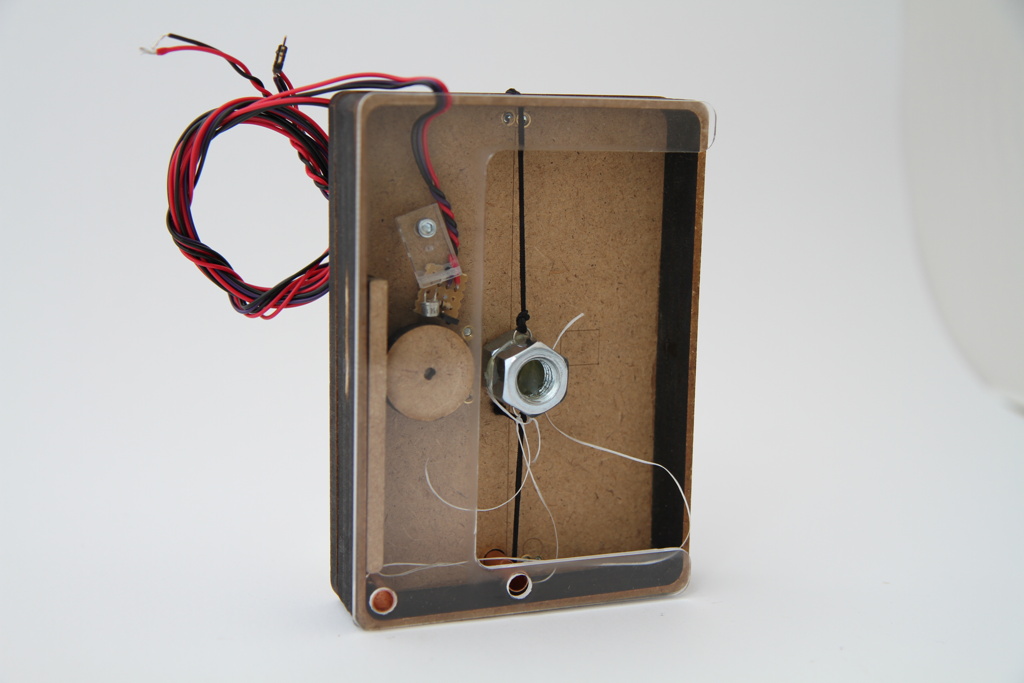
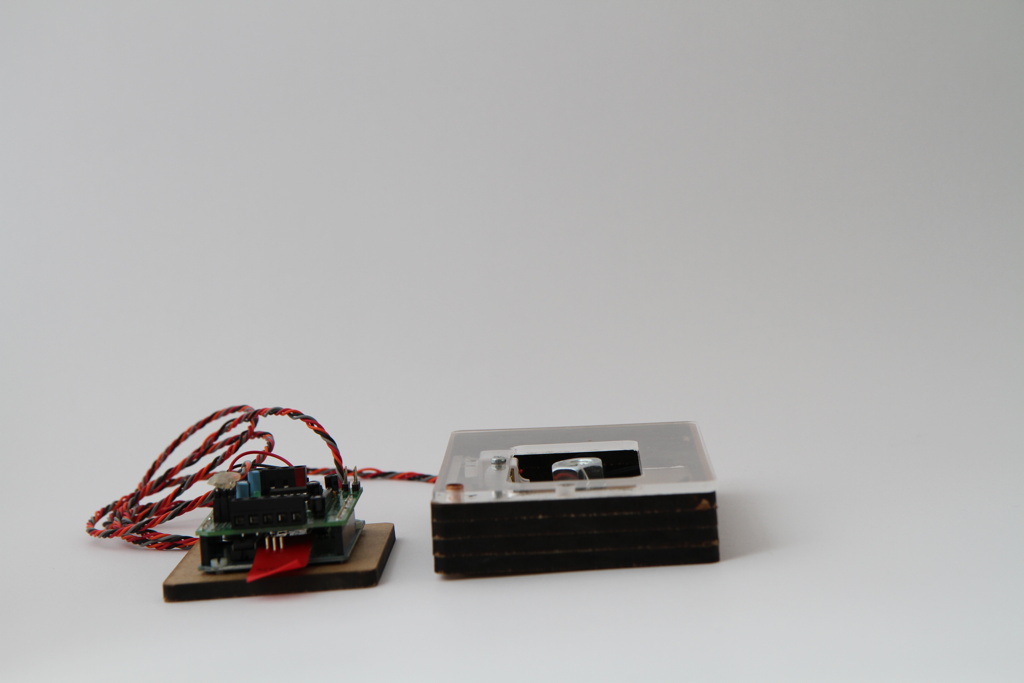
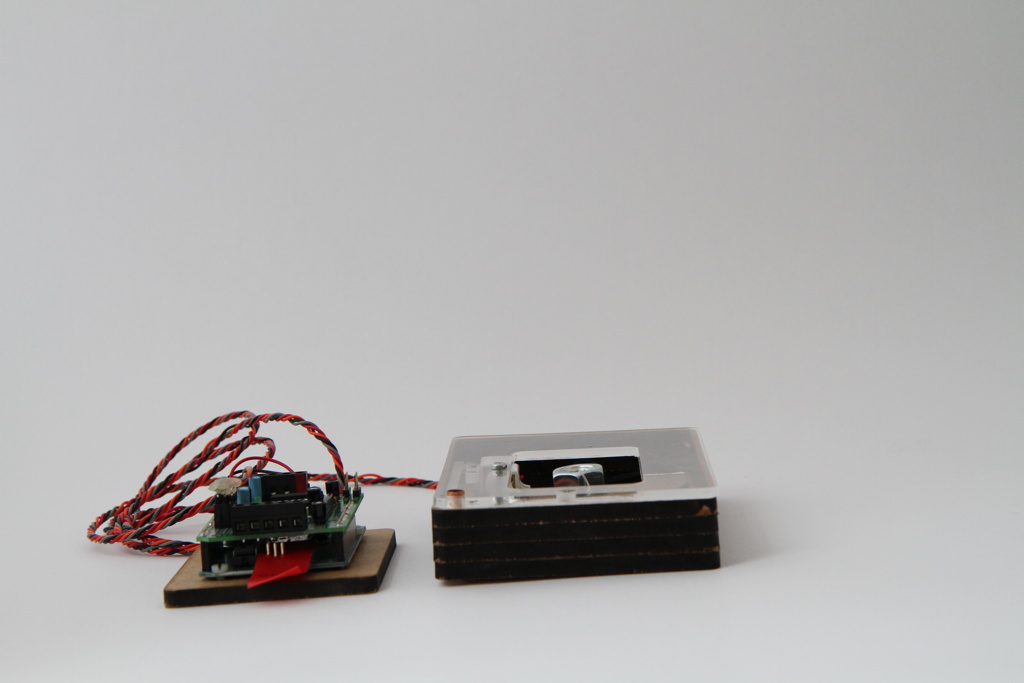
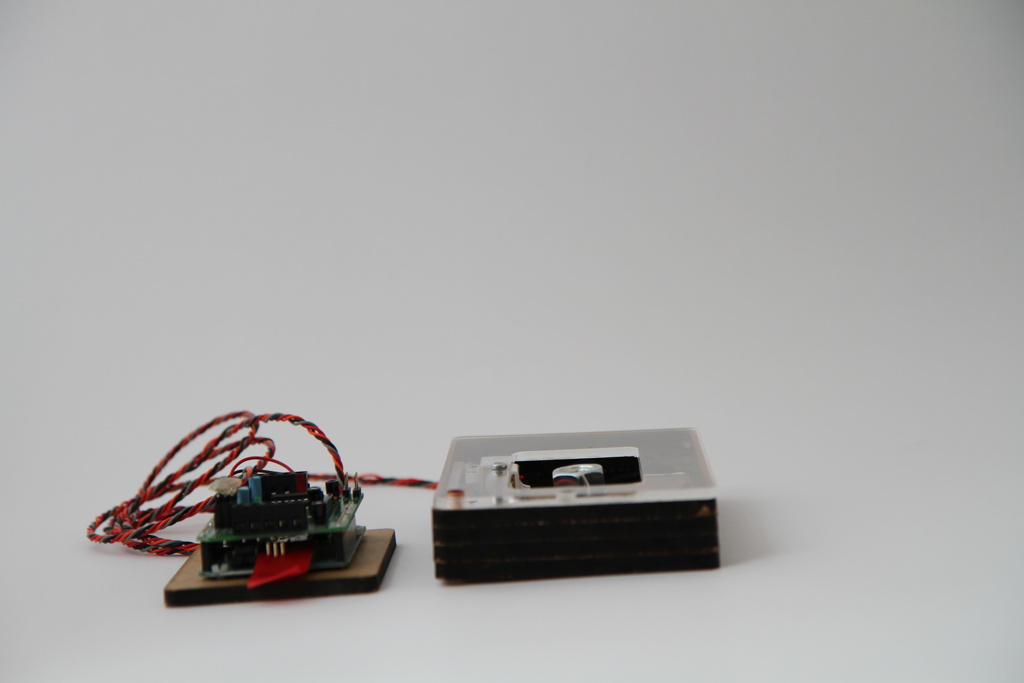
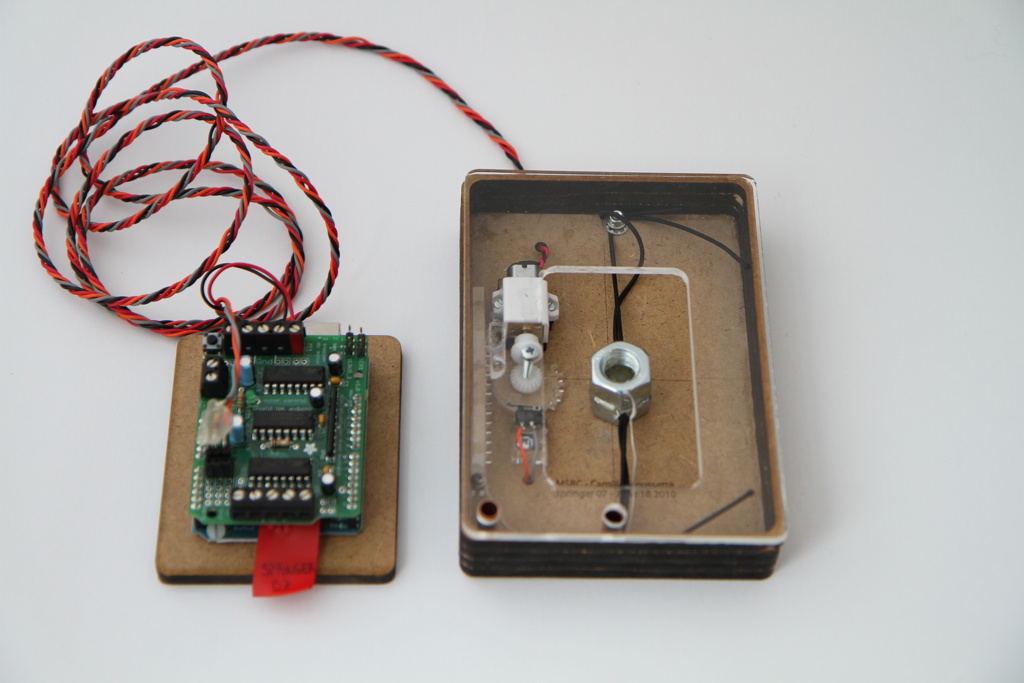
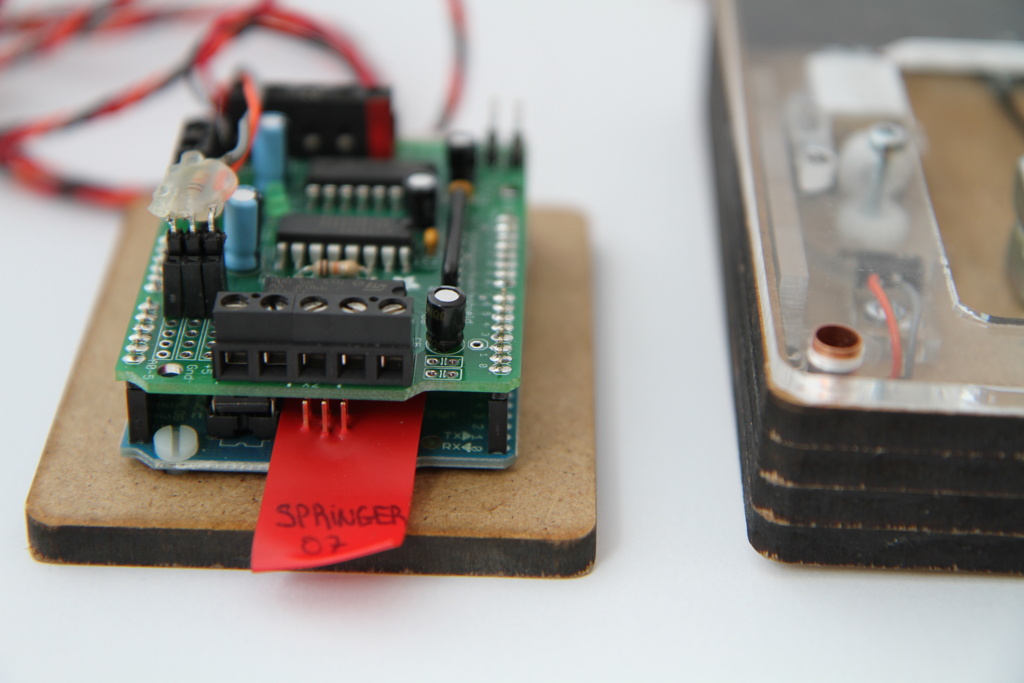
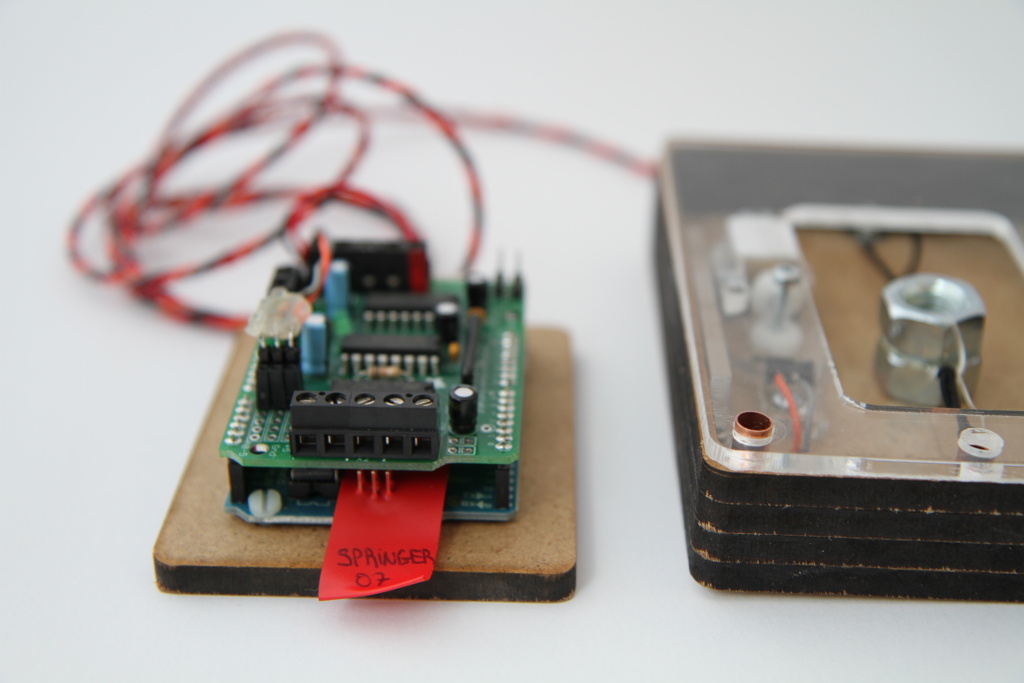
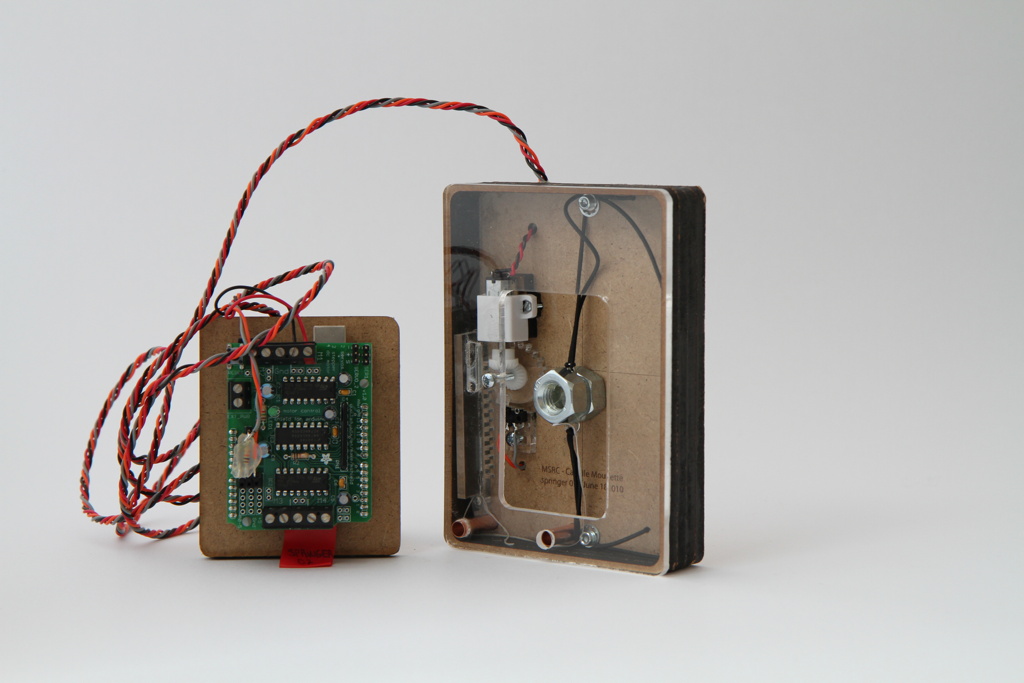
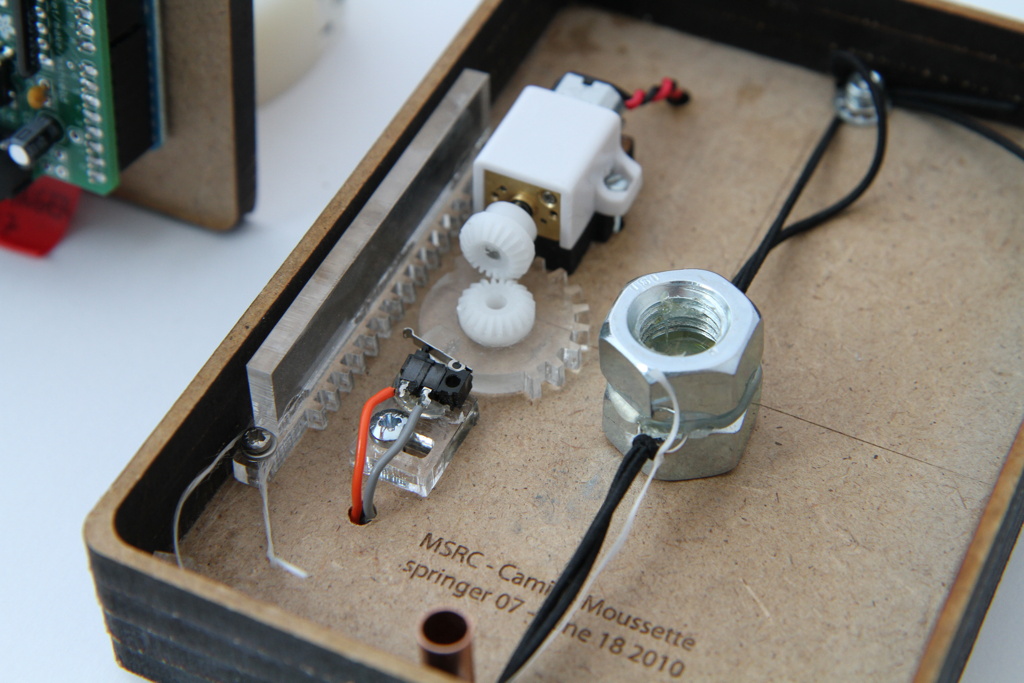
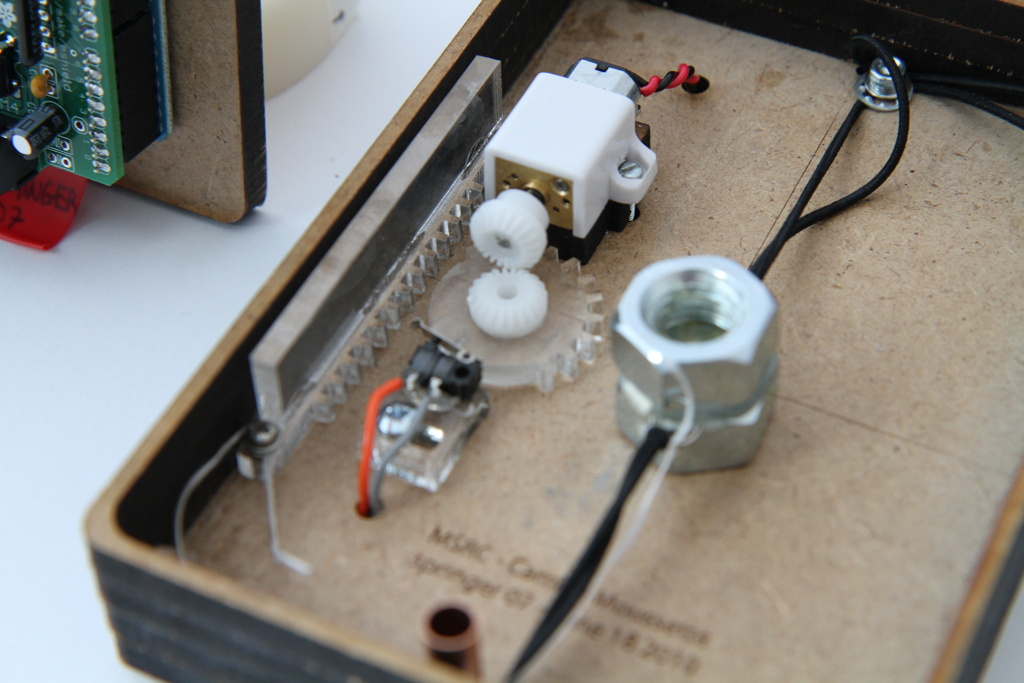
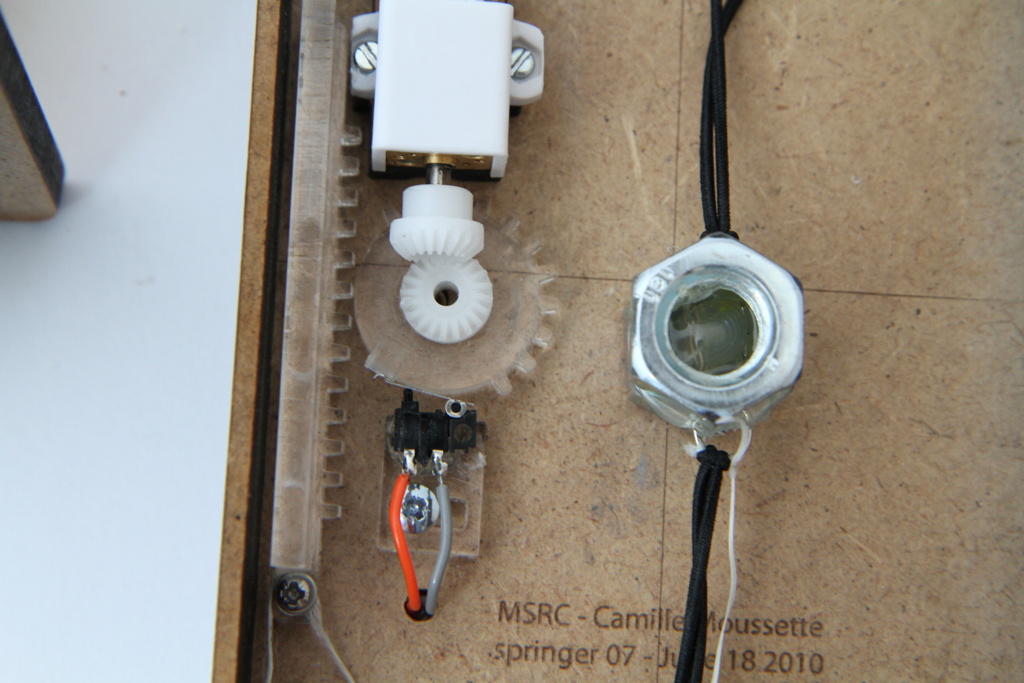
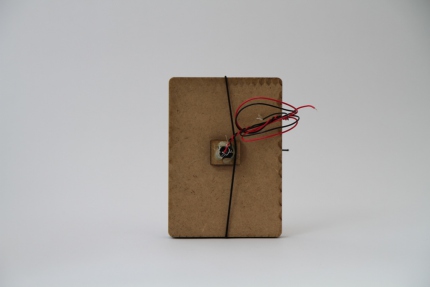
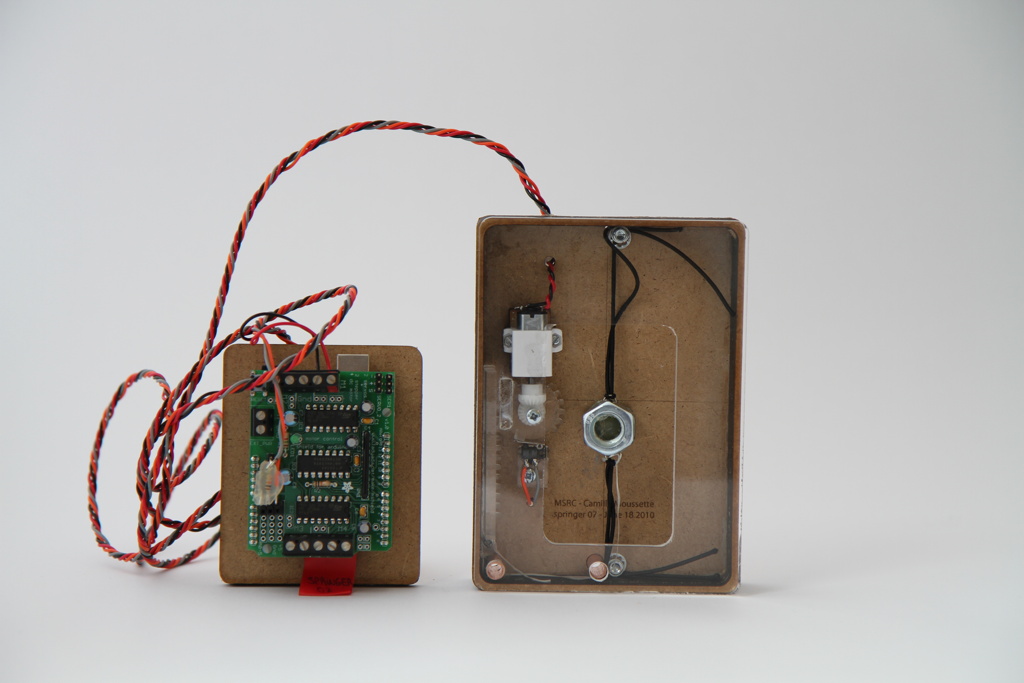
Springer 07 (final)
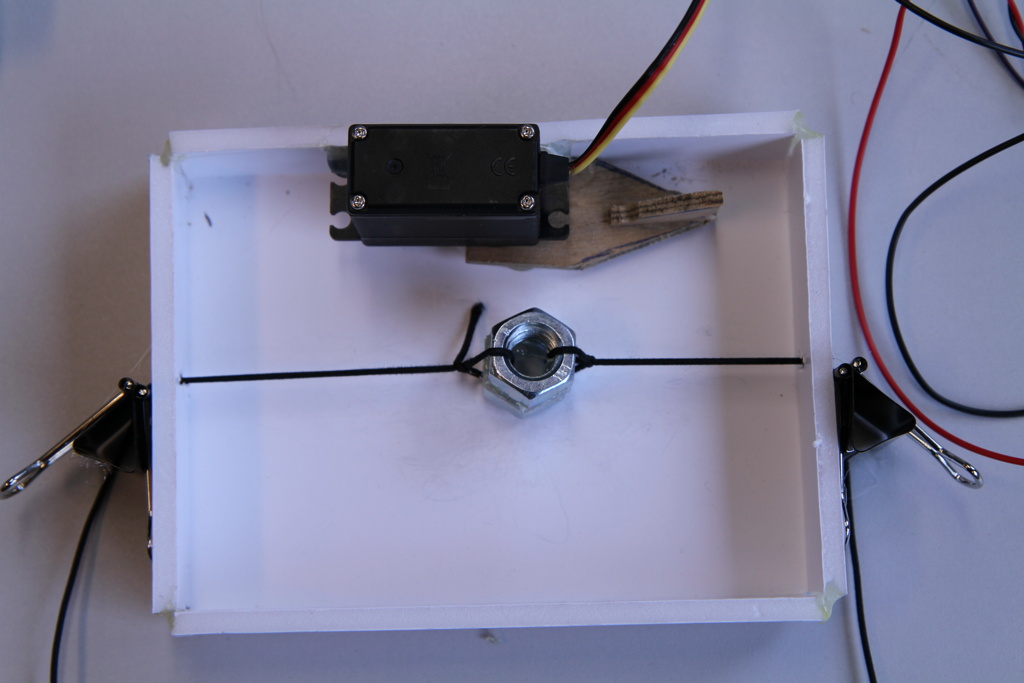
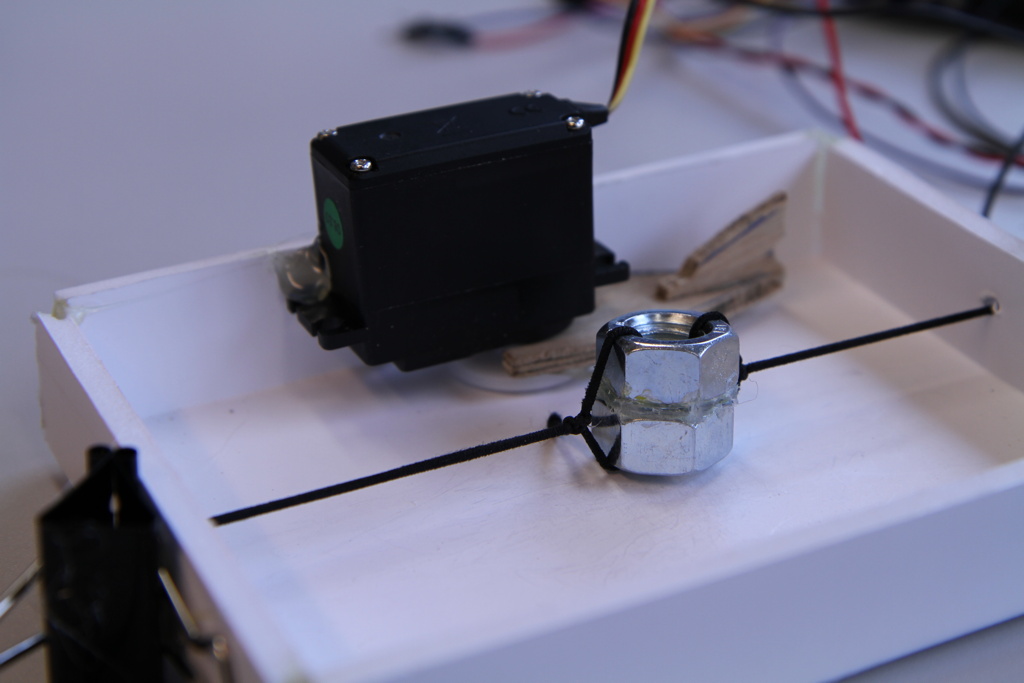
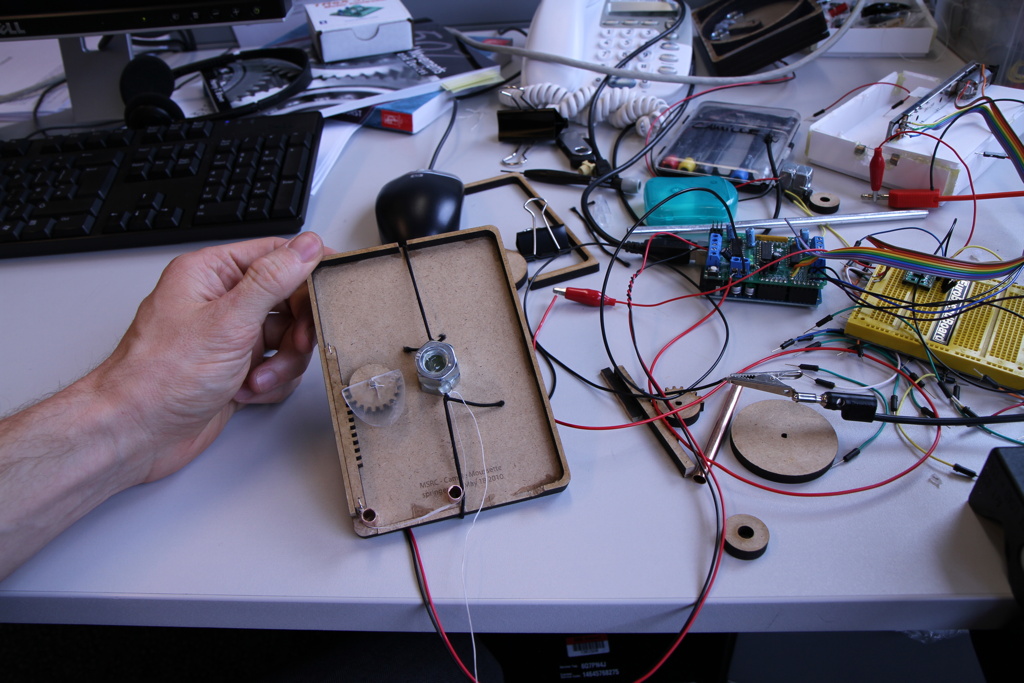
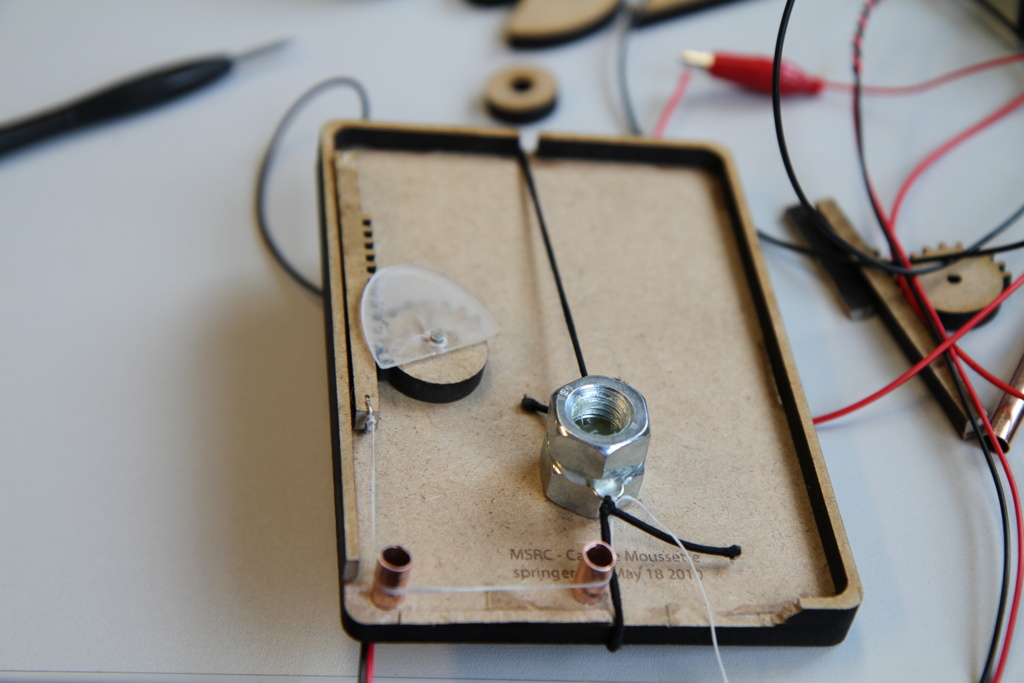
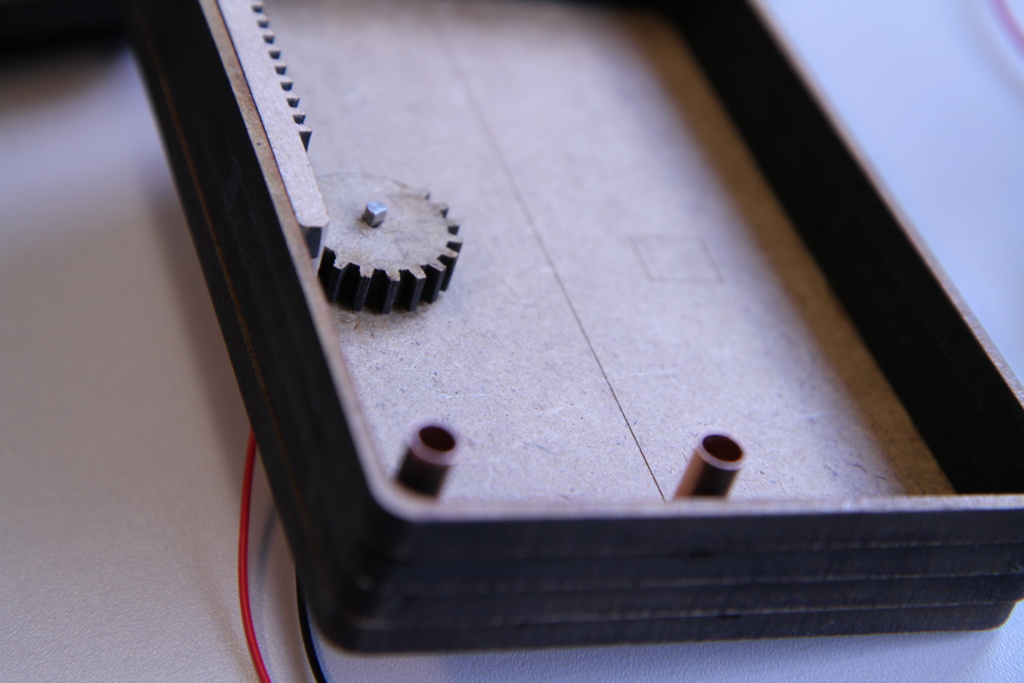
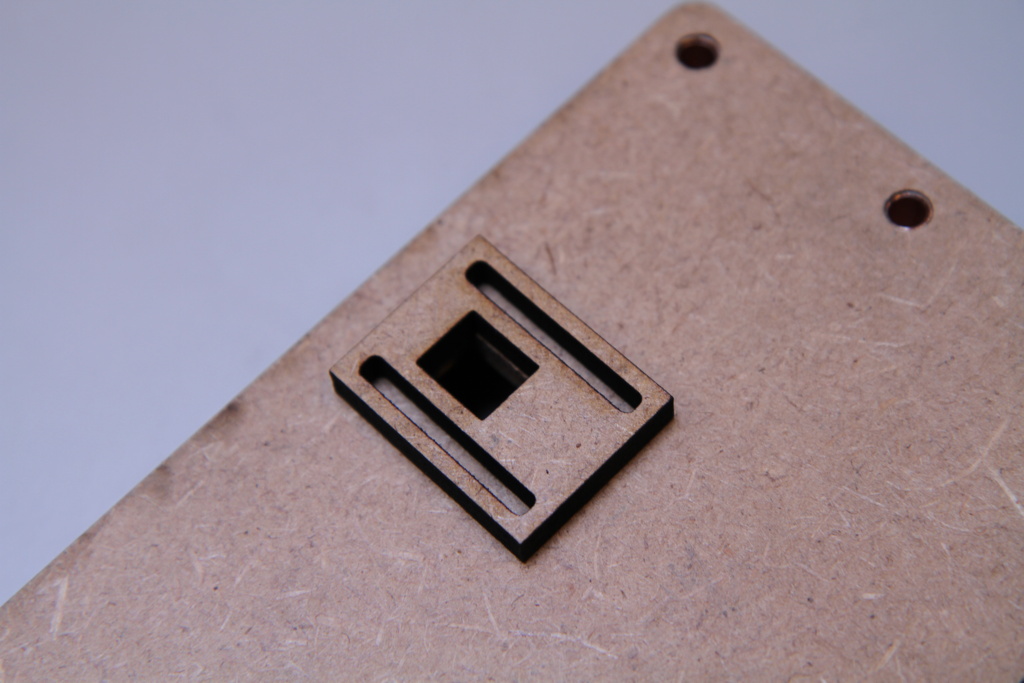
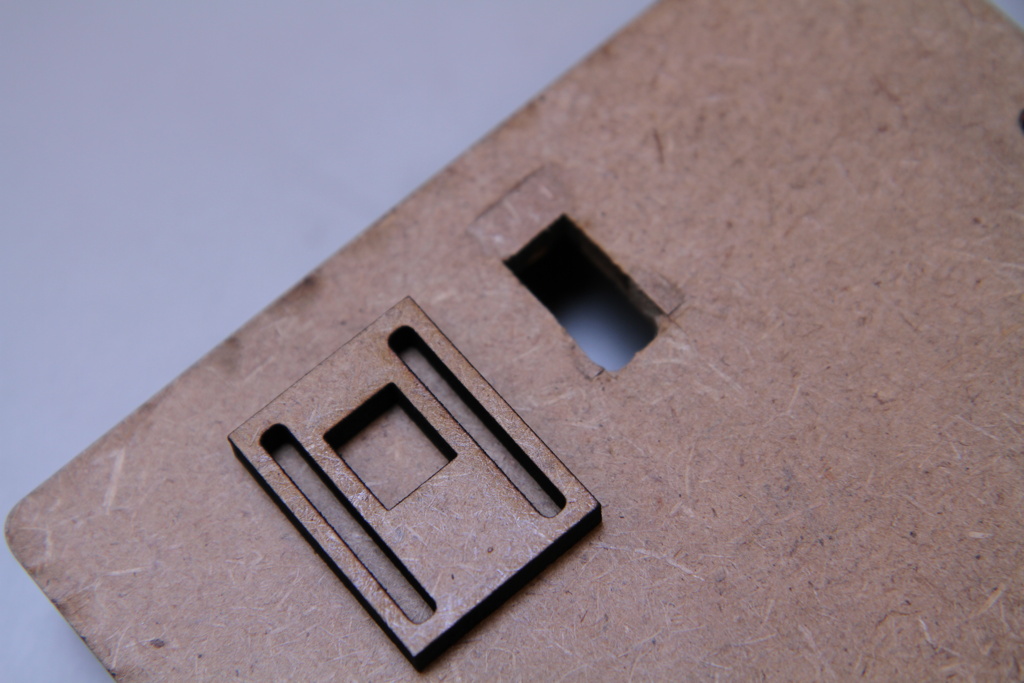
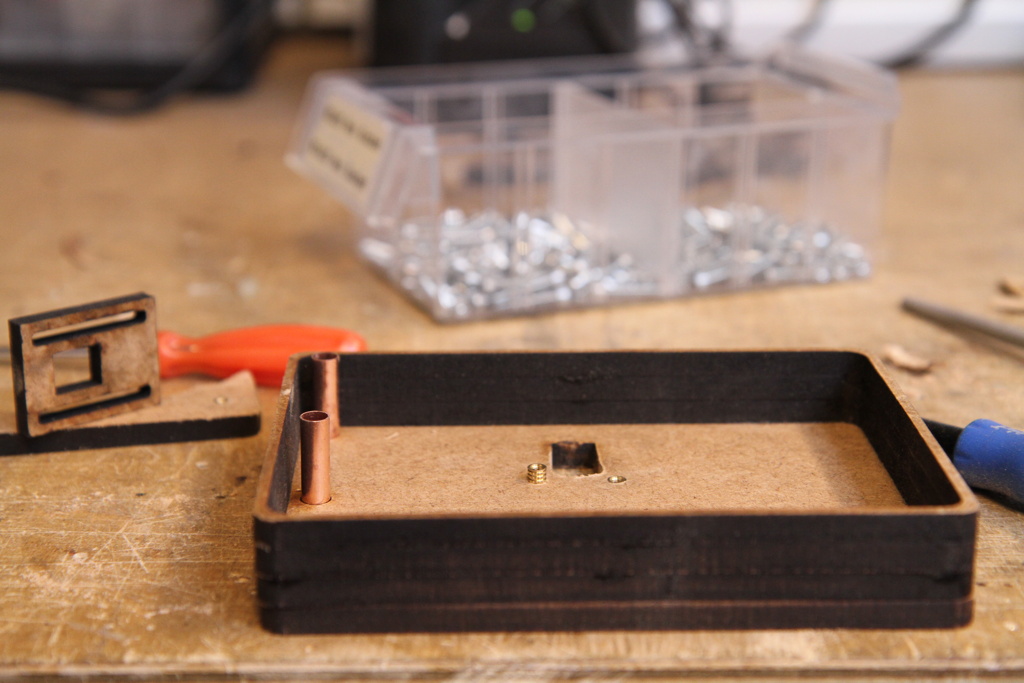
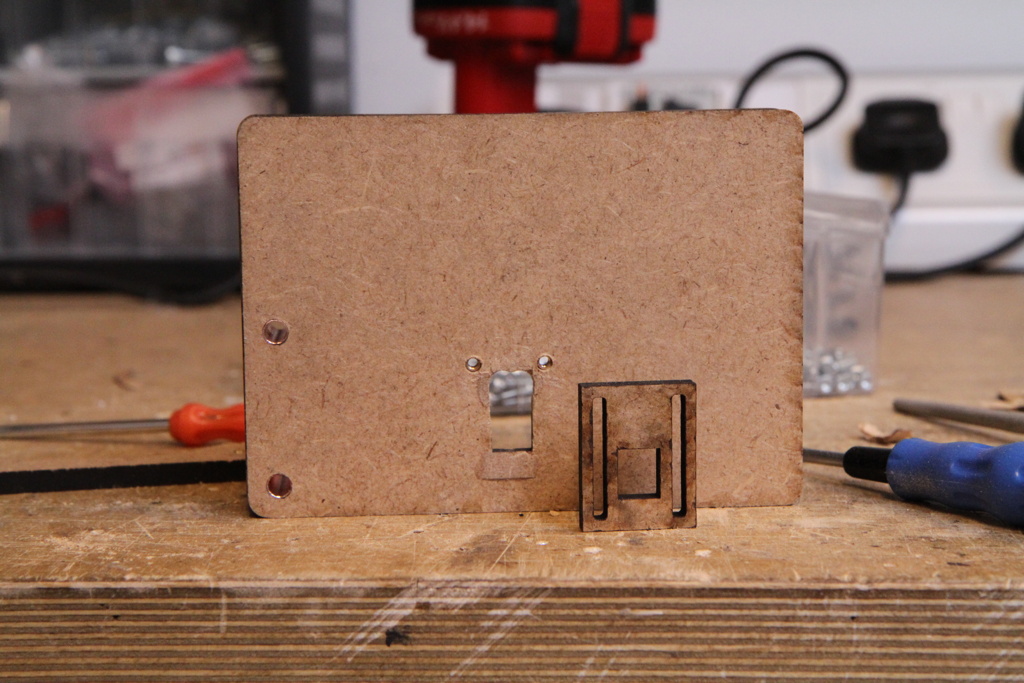
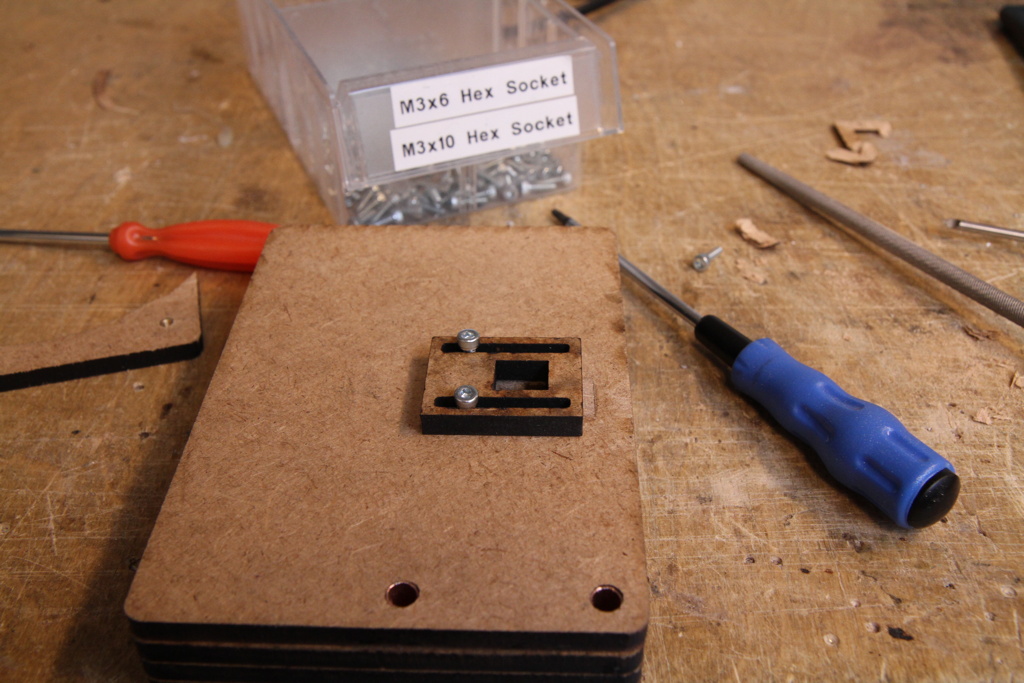
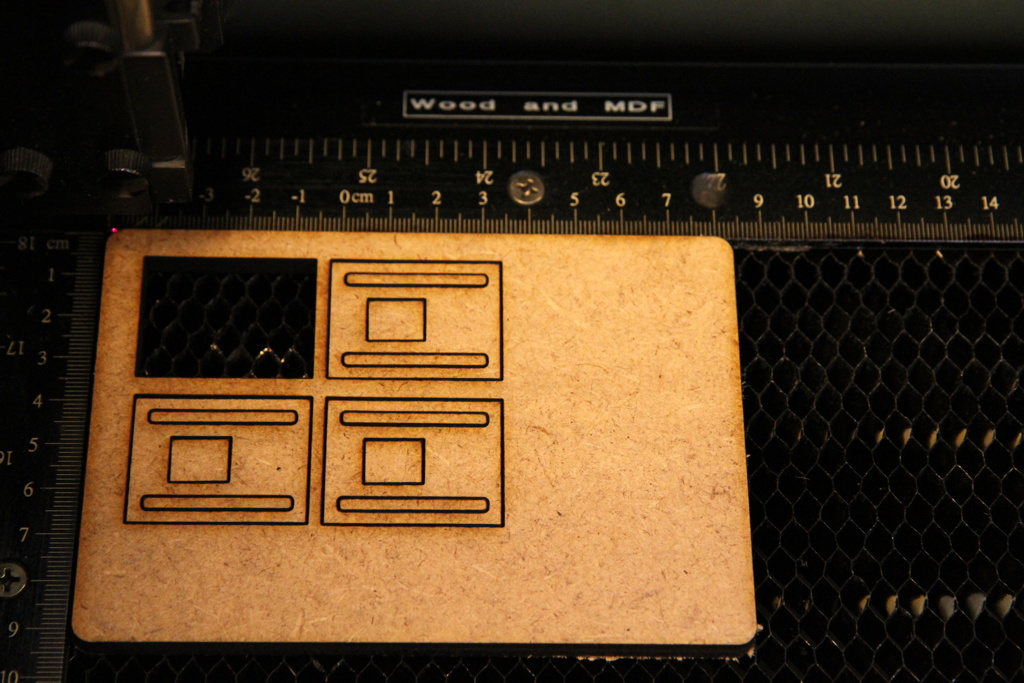
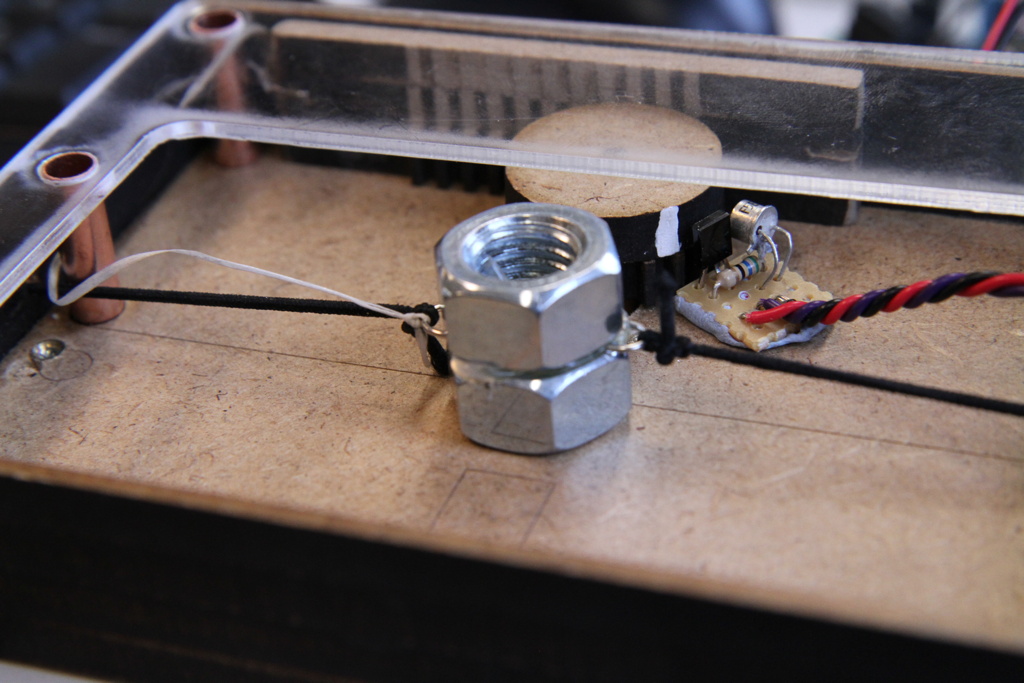
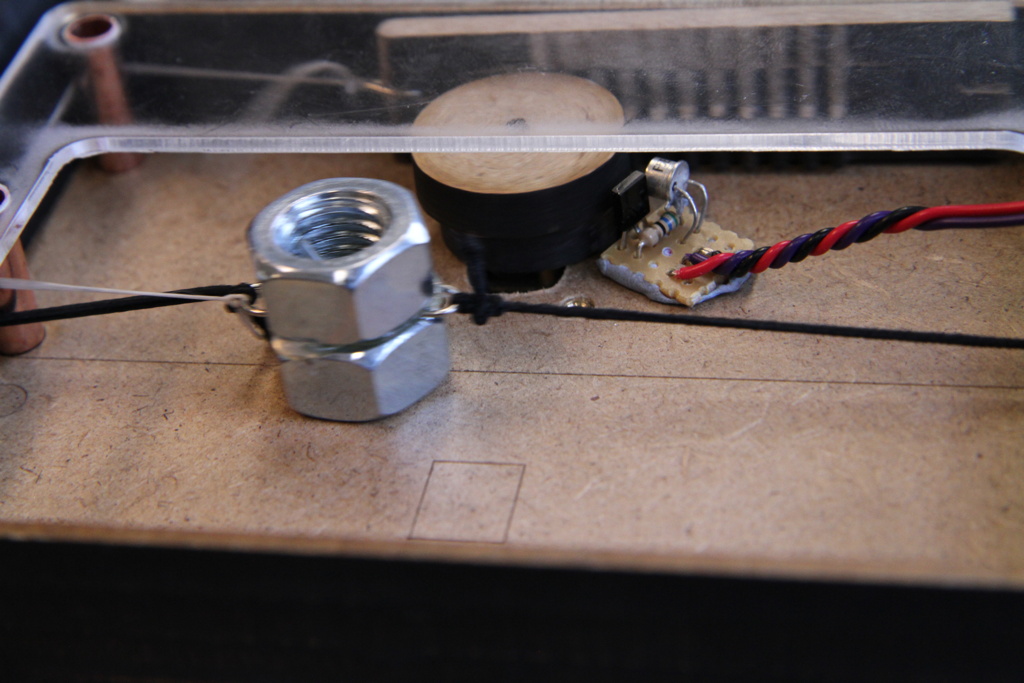
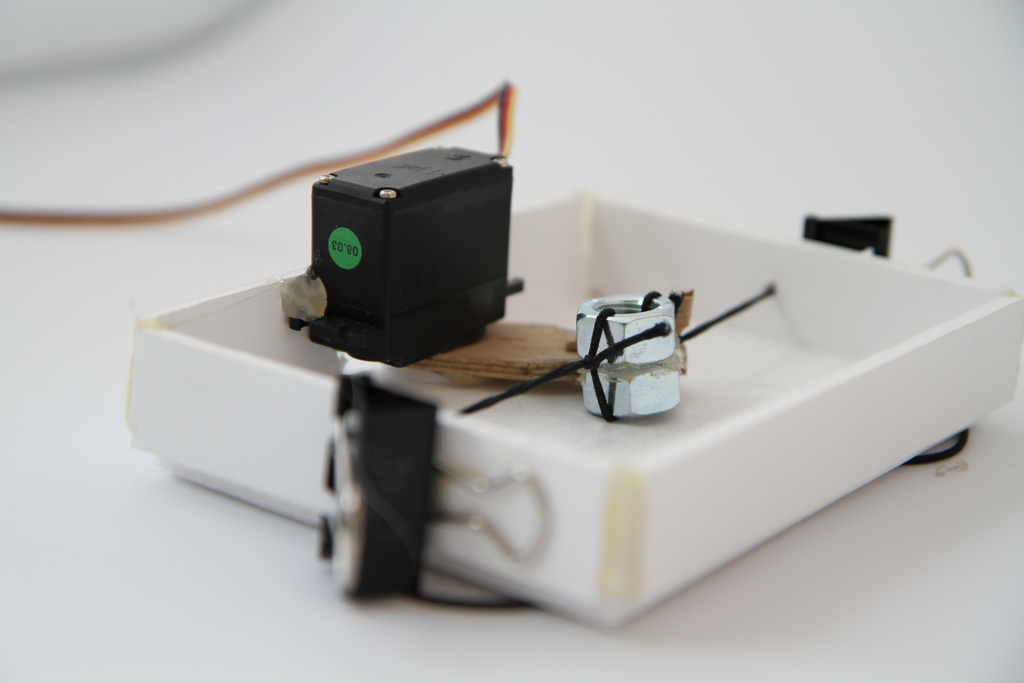
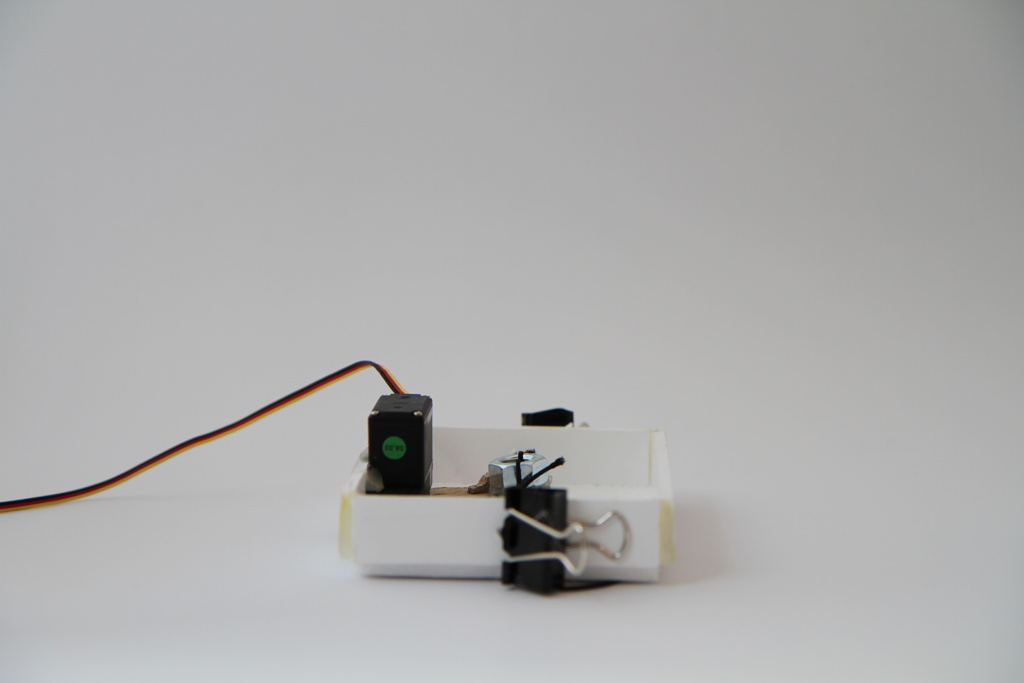
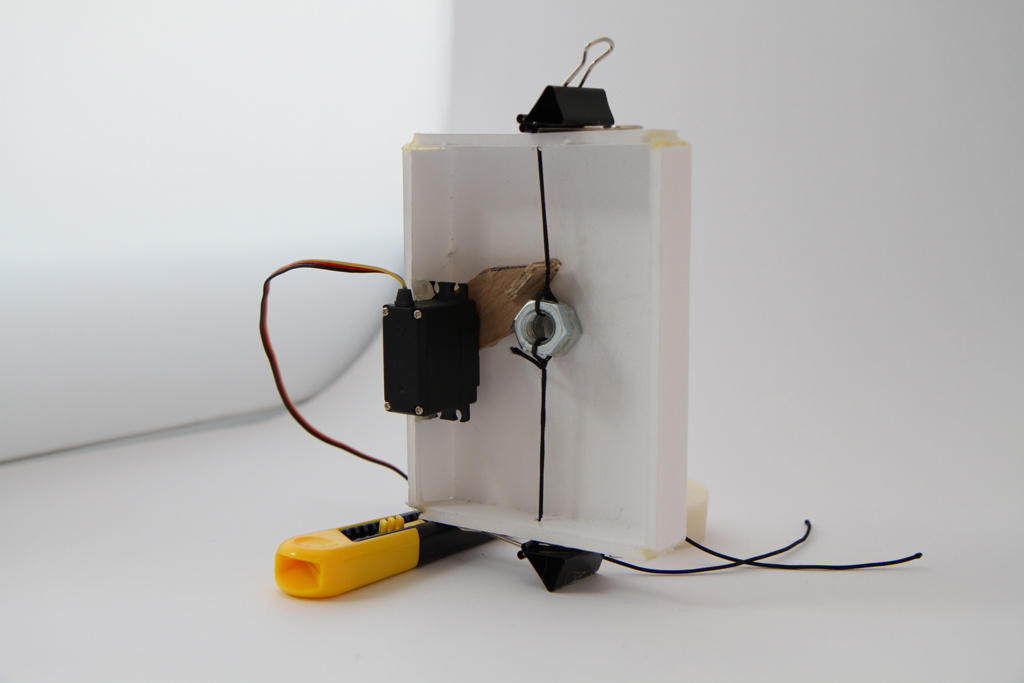
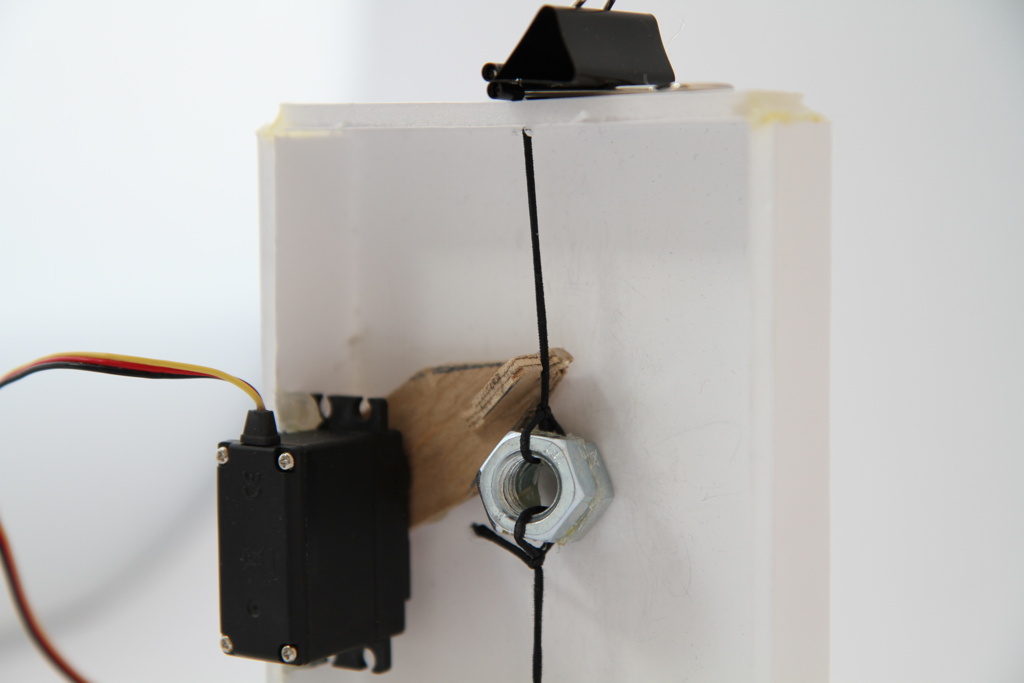
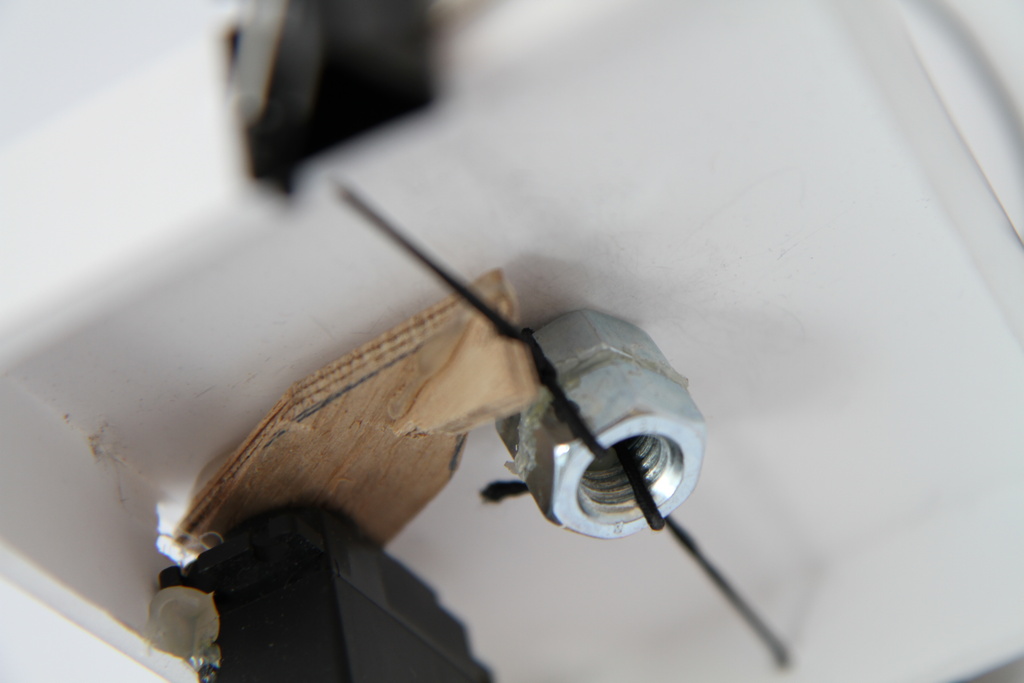
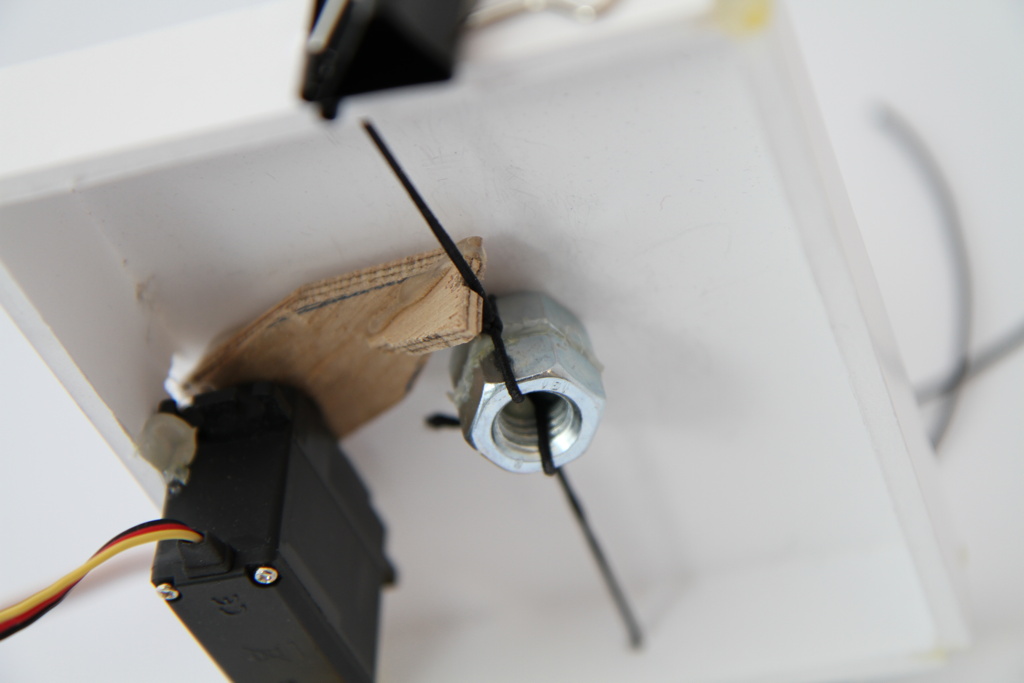
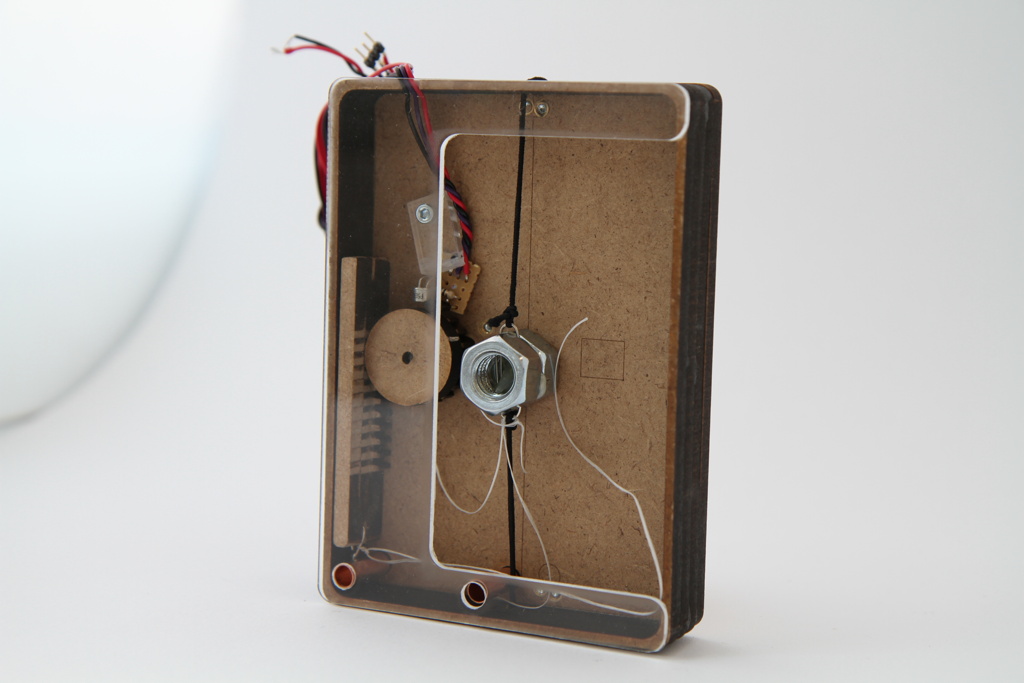
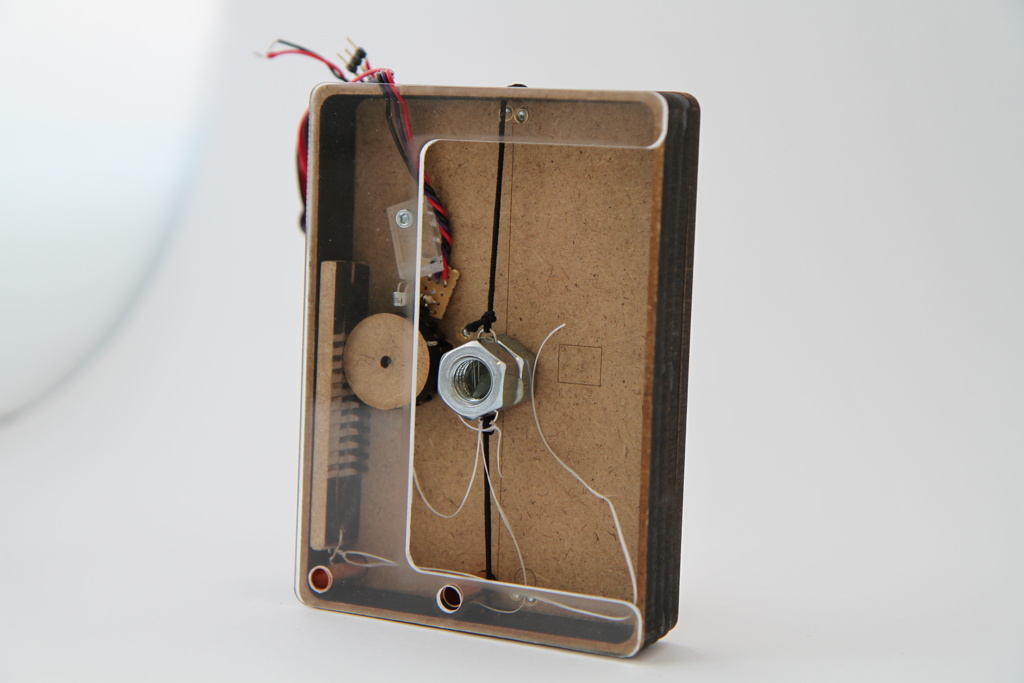
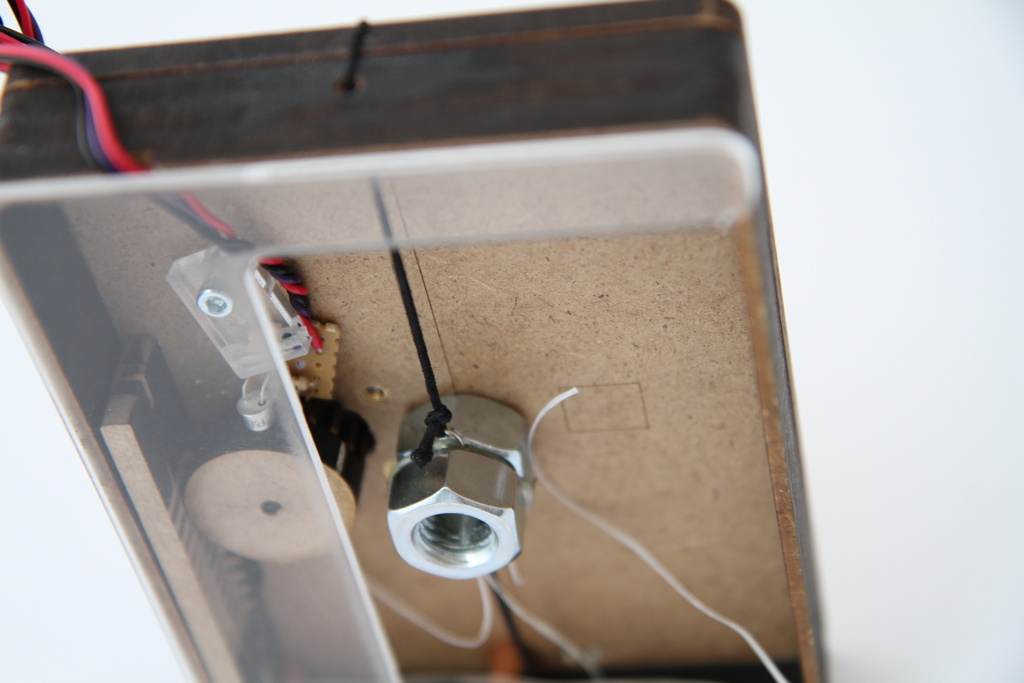
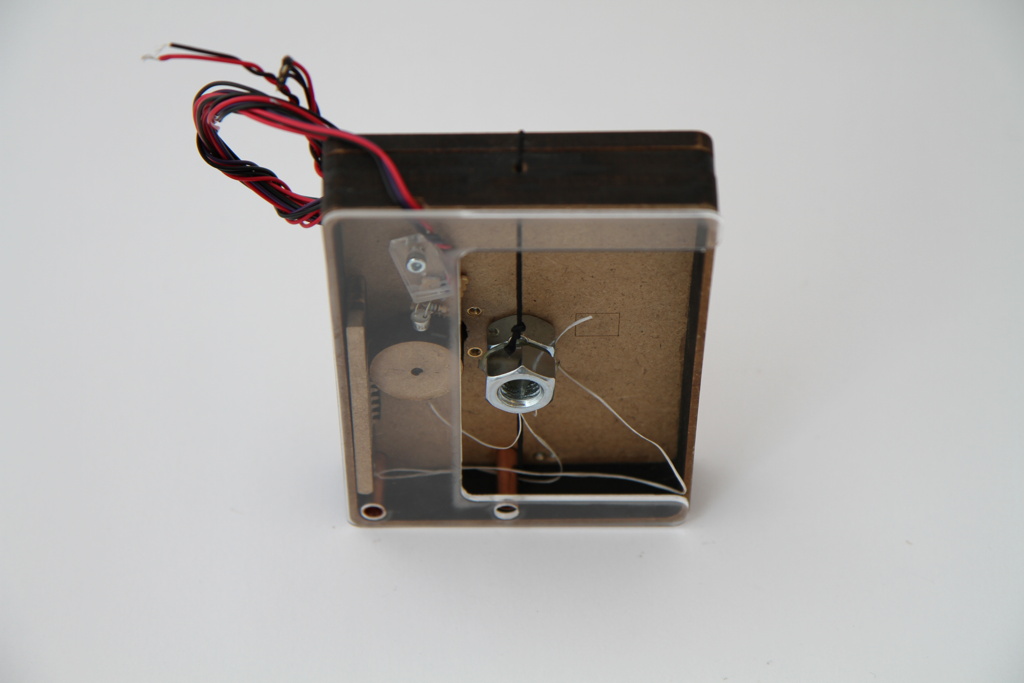
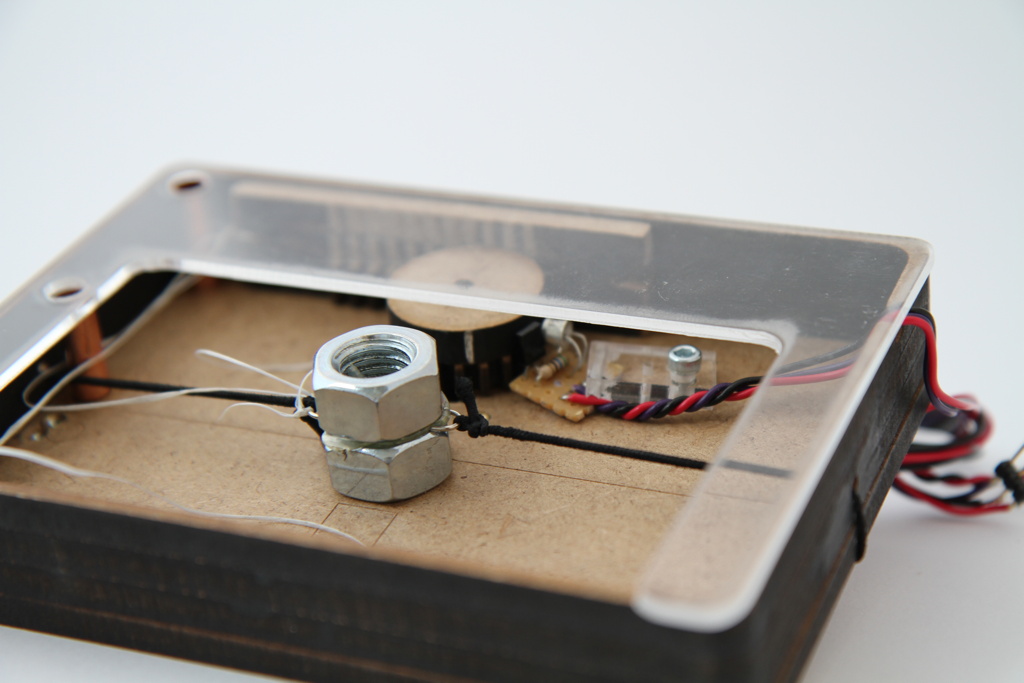
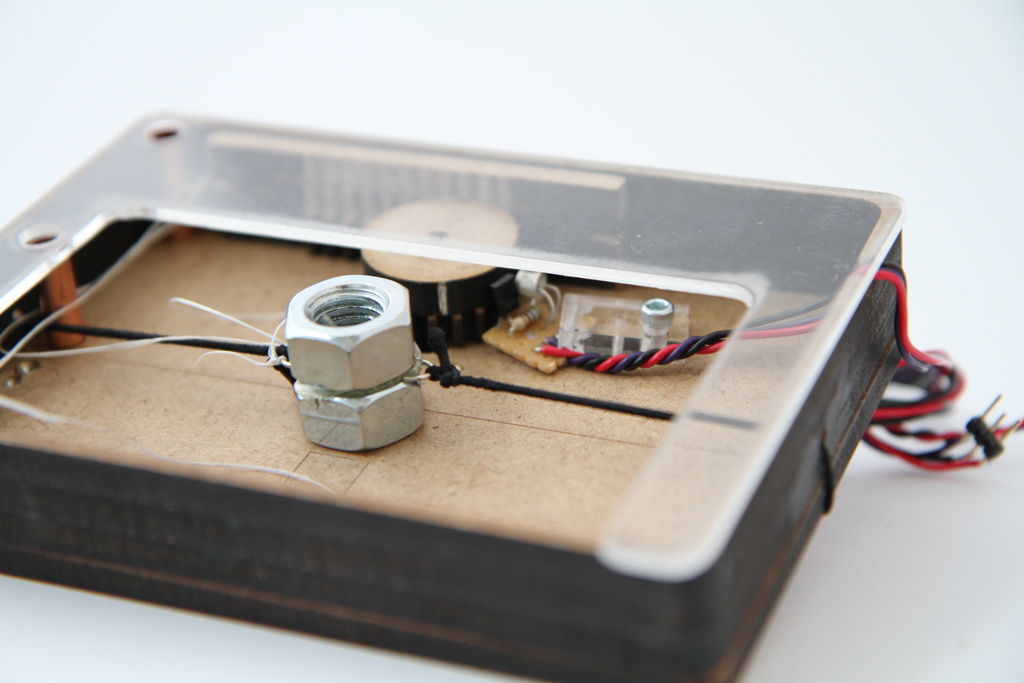
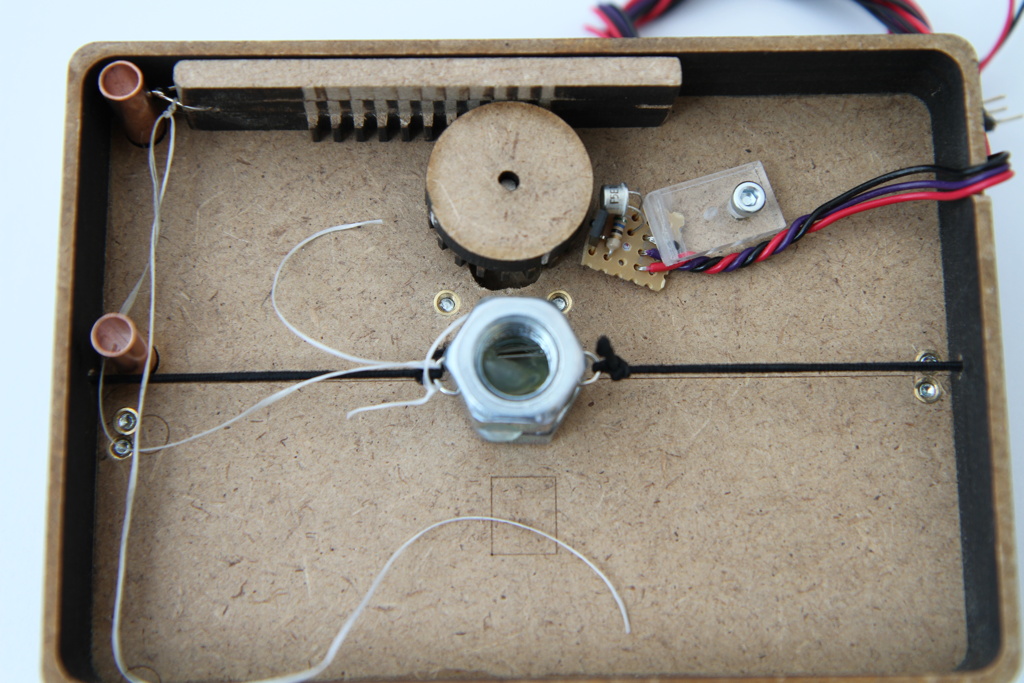
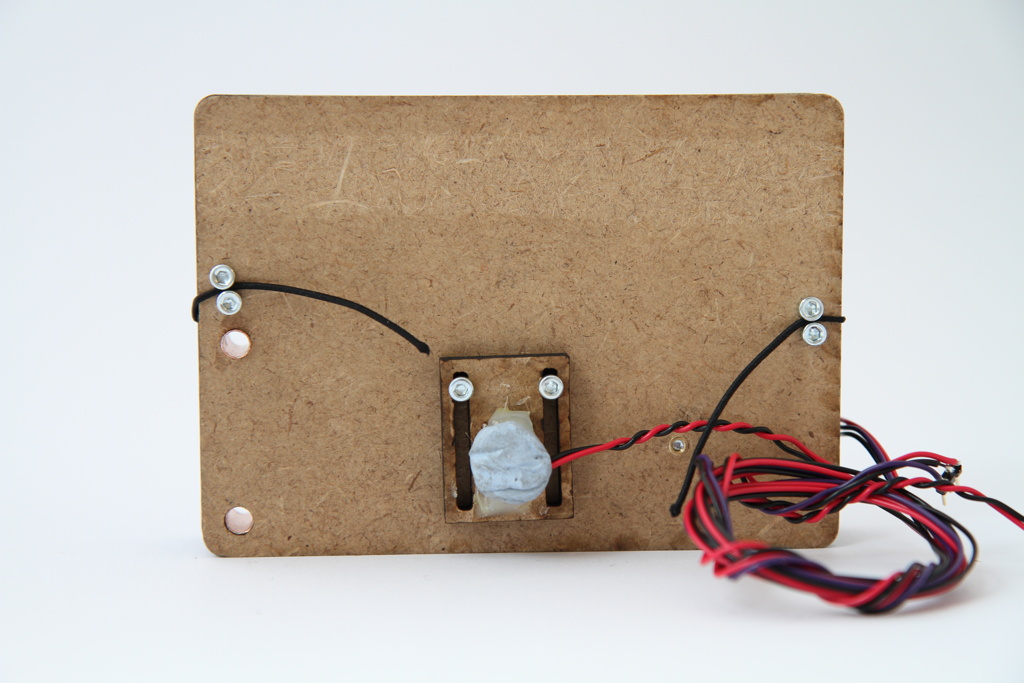
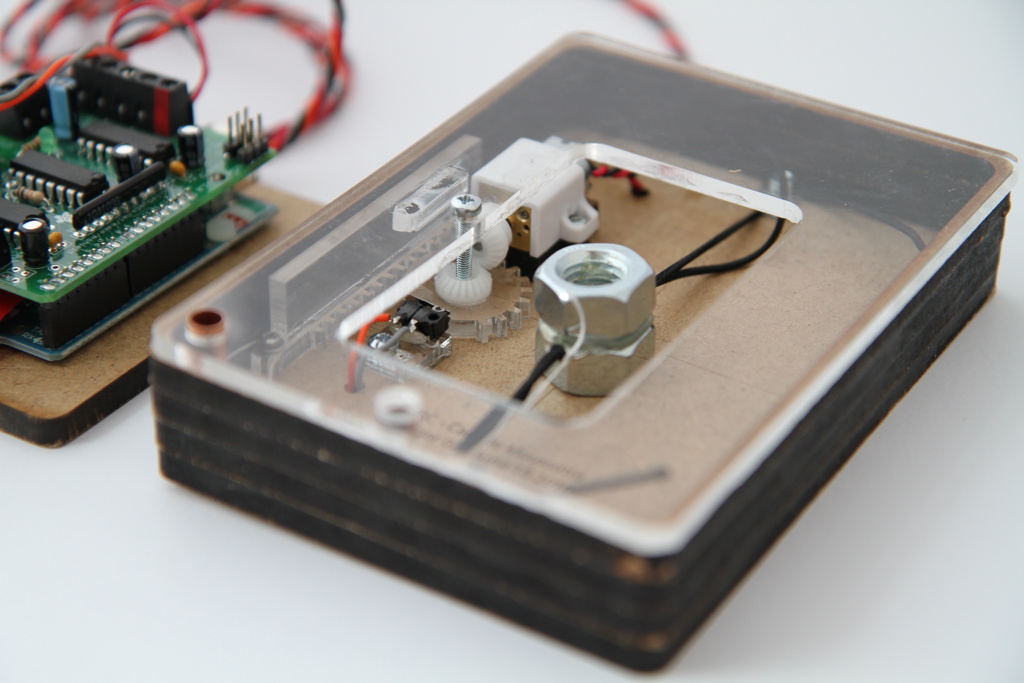
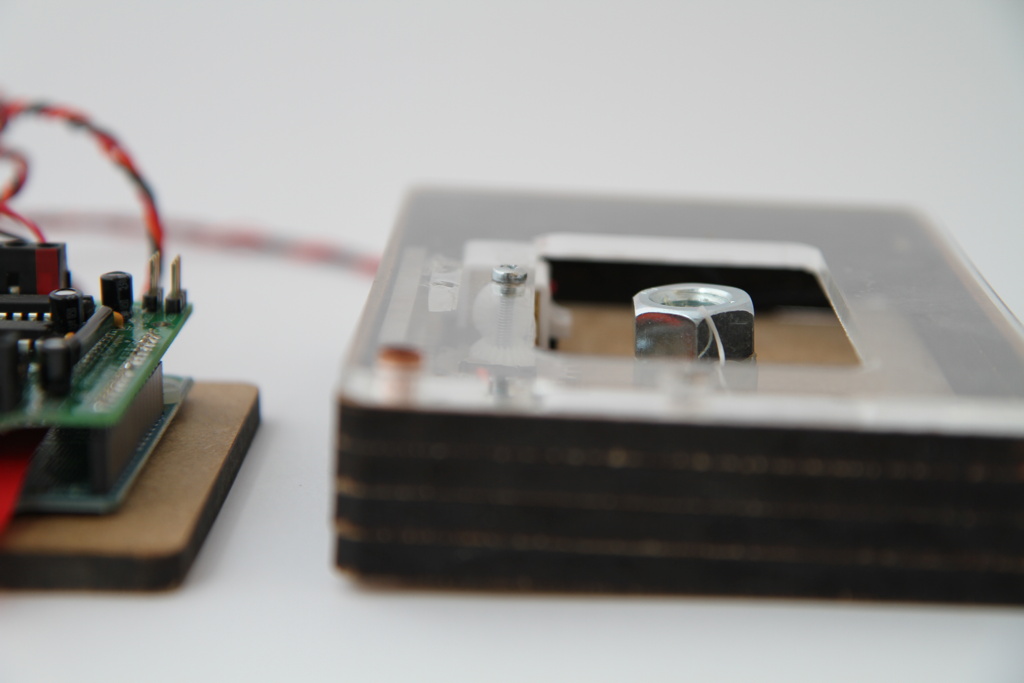
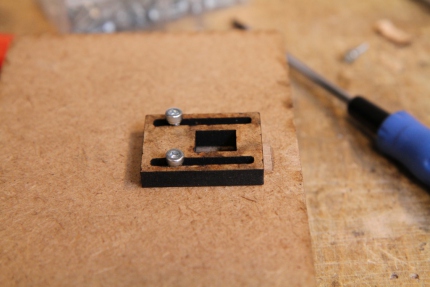
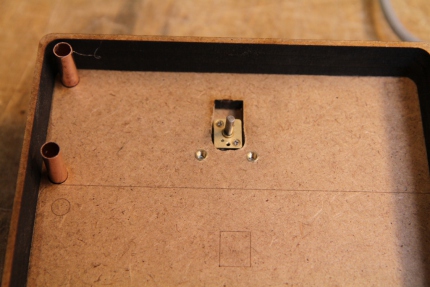
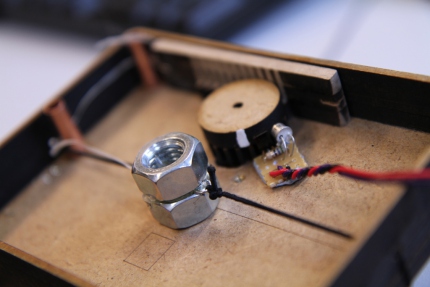
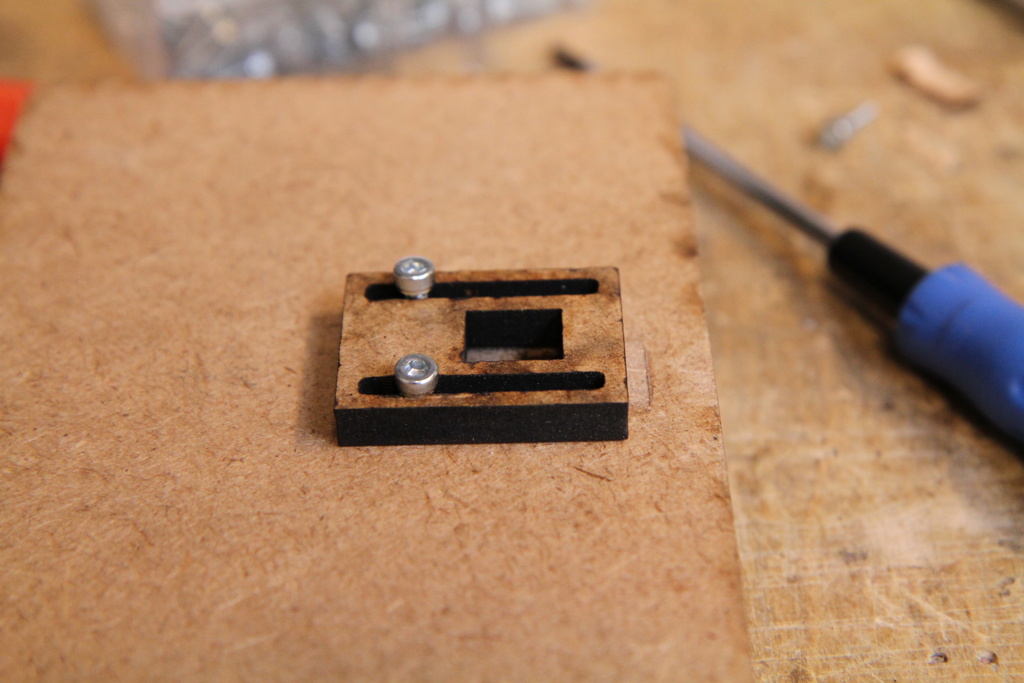
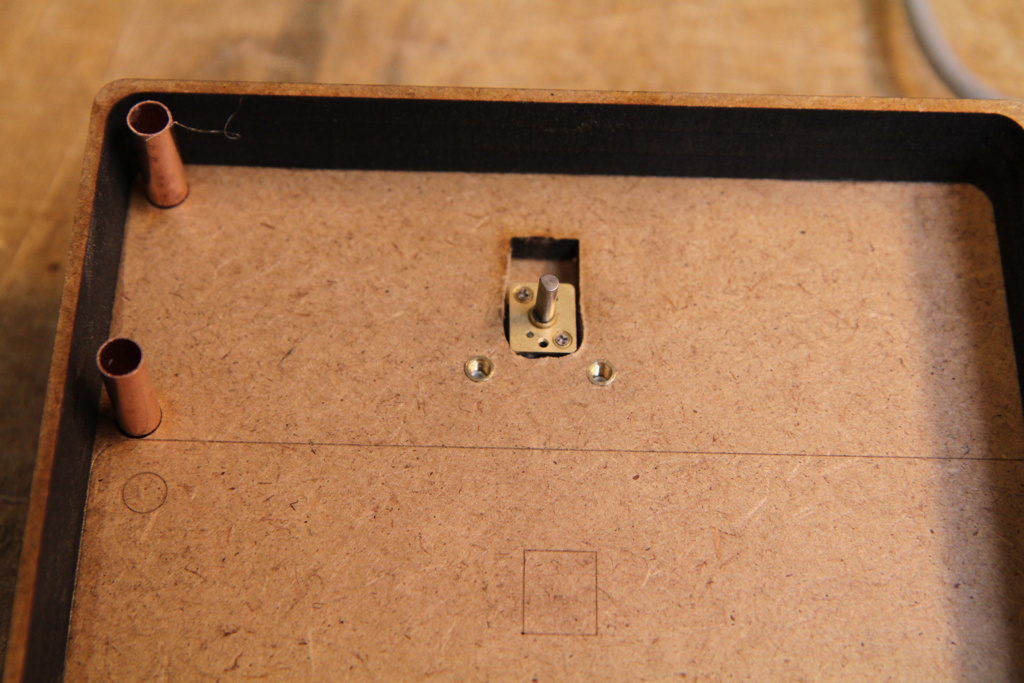
This last iteration is using a simple mechanical switch to coordinate the crank and the release actions. It proved to be much more durable and resilient than the previous solution with the IR sensor. This latest iteration is also optimized for compactness. The motor is now sitting flat in the unit.
Videos
Bouncing element to match bouncing UI when reach out of bound limit.

I tried initially to have a paddle hit the target. The haptic feedback was quite nice and accurate, but the the paddle was only grabbing the piece once every 5 or 6 times.
Springer 01
This first iteration is inspired by a classic stamping mechanism, using in the old days for punching and stamping metal parts. It is based on a rotational movement ramping along a cam or arc. On the picture above, you see the failed configuration: the cam or curved ramp is too sharp or abrupt, and the clearance is not enough to allow a free springing action.
Springer 02 - 06
The following iterations were made using a half-geared wheel. Coupled with a retention spring, it provides a simple crank and release mechanism. I initially trid to just use time to synchronize the crank action from the release action, but it was not consistent. I then switch to a infrared red (IR) light sensor. By marking the black wheel with white strips I could define and time the different actions. It was like scripting and timing with a tangible marker. It was a bit too unreliable due to the ambient light conditions.
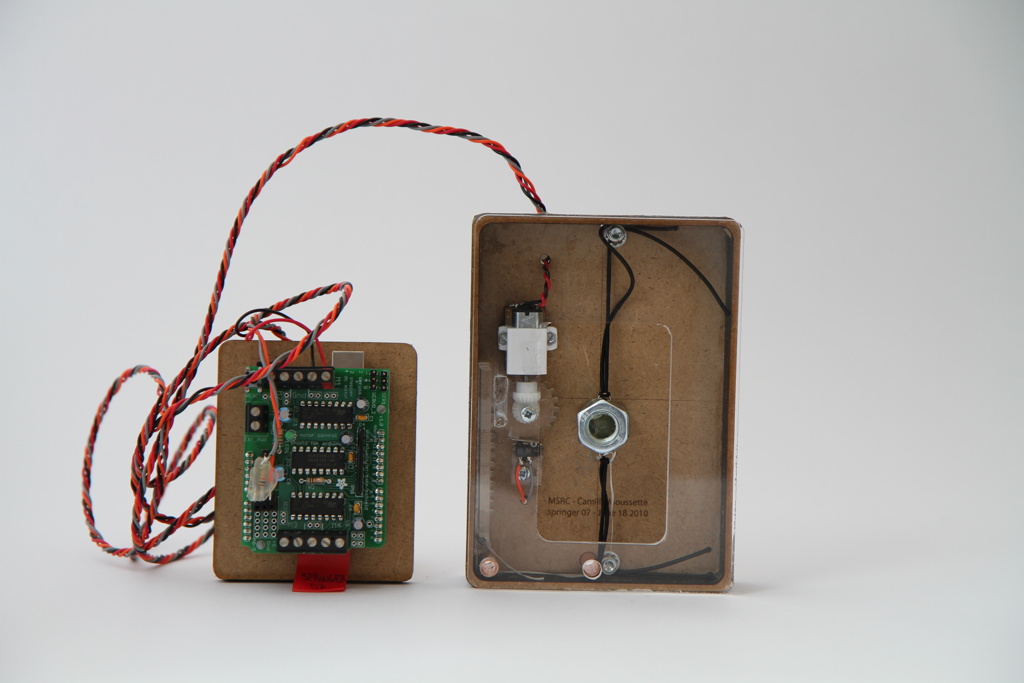
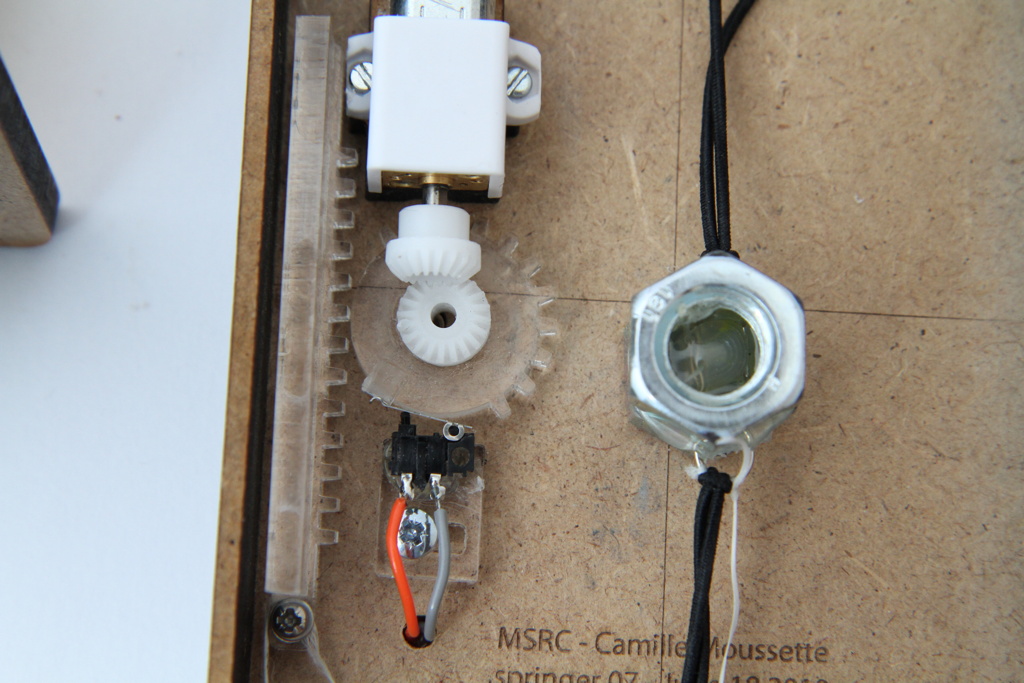
Springer 07 (final)
This last iteration is using a simple mechanical switch to coordinate the crank and the release actions. It proved to be much more durable and resilient than the previous solution with the IR sensor. This latest iteration is also optimized for compactness. The motor is now sitting flat in the unit.
Videos

This first iteration is inspired by a classic stamping mechanism, using in the old days for punching and stamping metal parts. It is based on a rotational movement ramping along a cam or arc. On the picture above, you see the failed configuration: the cam or curved ramp is too sharp or abrupt, and the clearance is not enough to allow a free springing action.
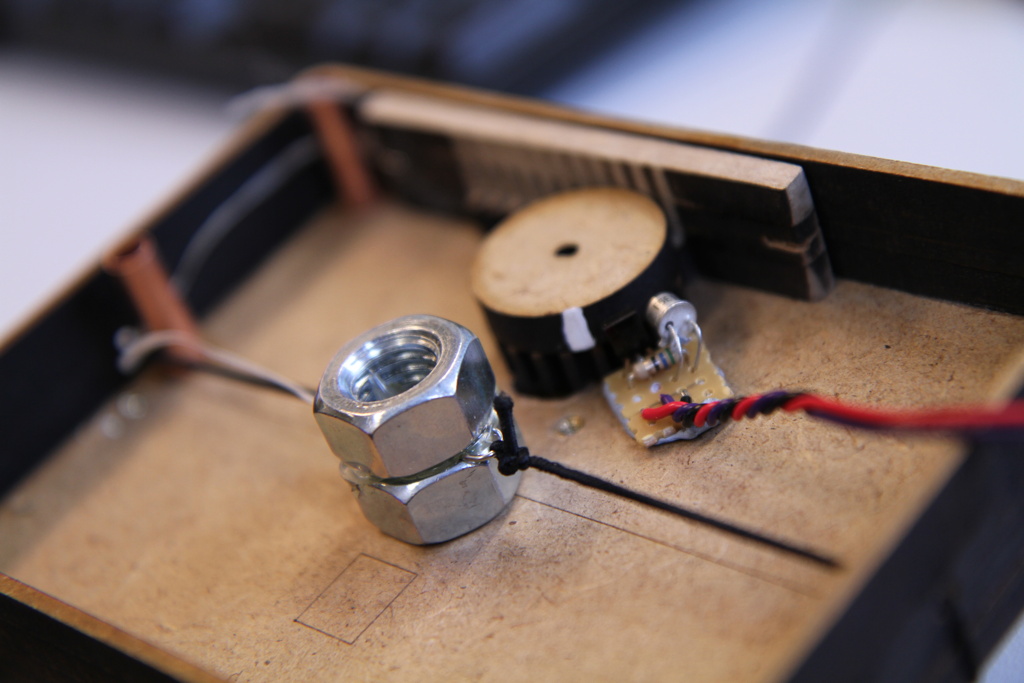
The following iterations were made using a half-geared wheel. Coupled with a retention spring, it provides a simple crank and release mechanism. I initially trid to just use time to synchronize the crank action from the release action, but it was not consistent. I then switch to a infrared red (IR) light sensor. By marking the black wheel with white strips I could define and time the different actions. It was like scripting and timing with a tangible marker. It was a bit too unreliable due to the ambient light conditions.
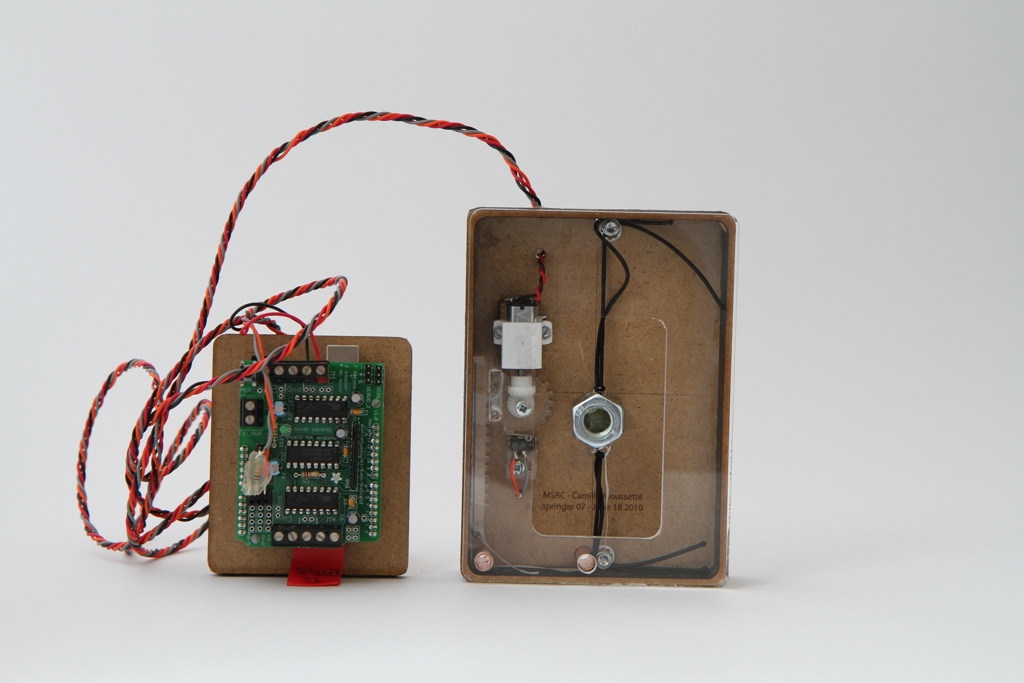
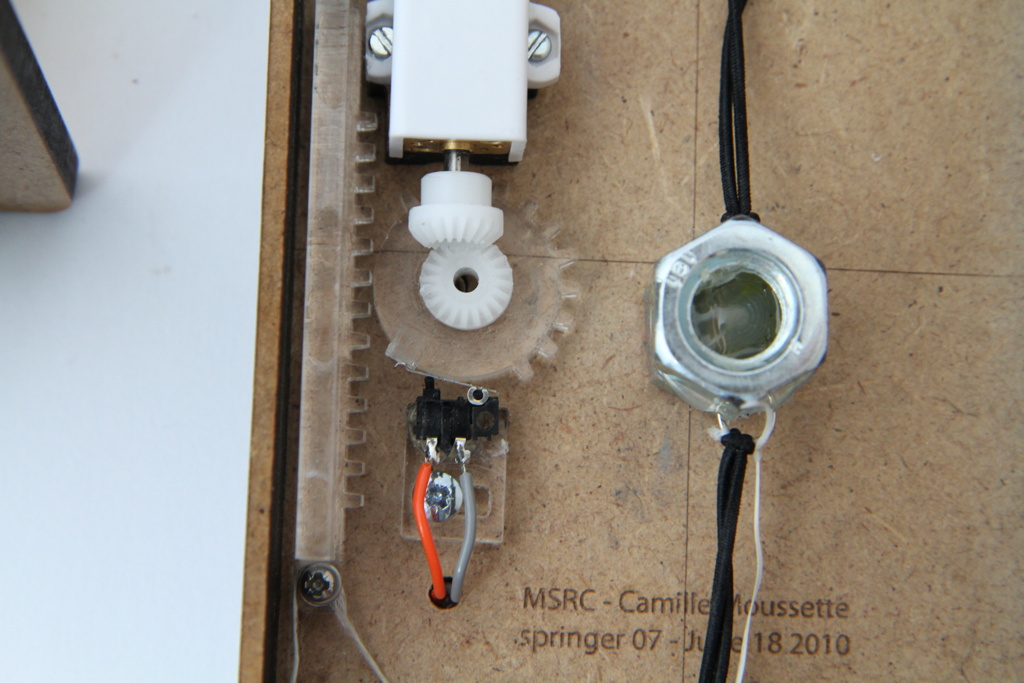
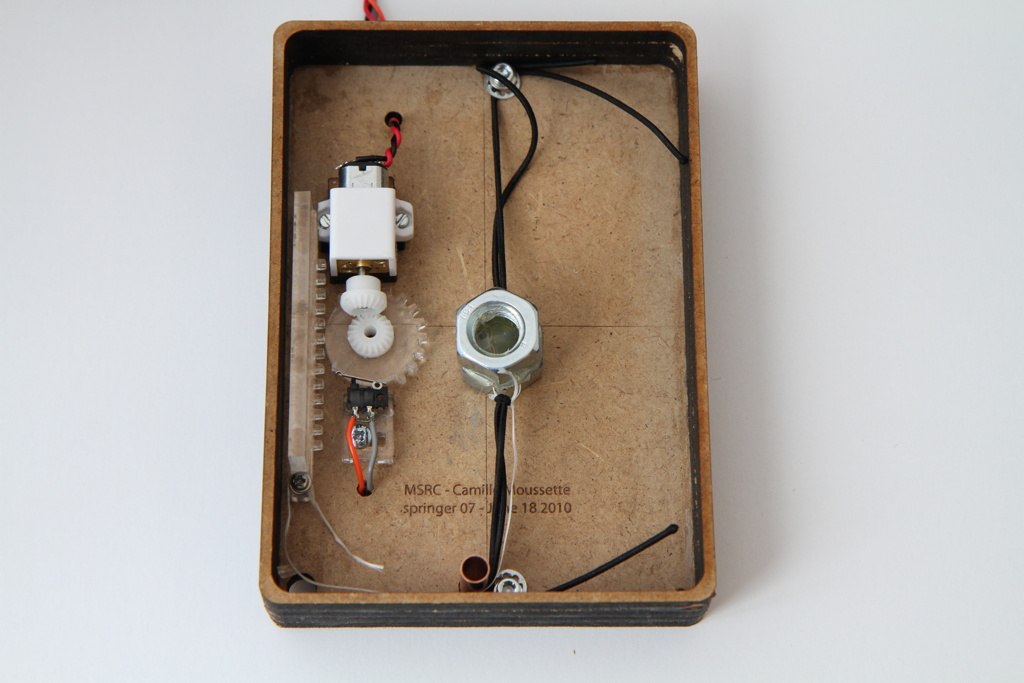
Springer 07 (final)
This last iteration is using a simple mechanical switch to coordinate the crank and the release actions. It proved to be much more durable and resilient than the previous solution with the IR sensor. This latest iteration is also optimized for compactness. The motor is now sitting flat in the unit.
Videos
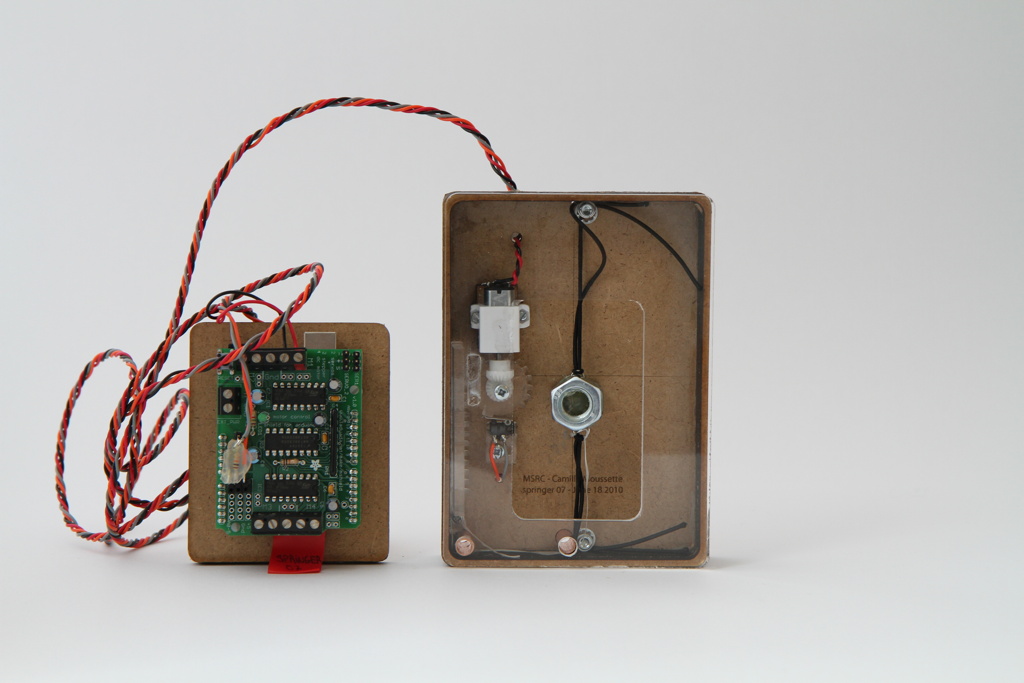
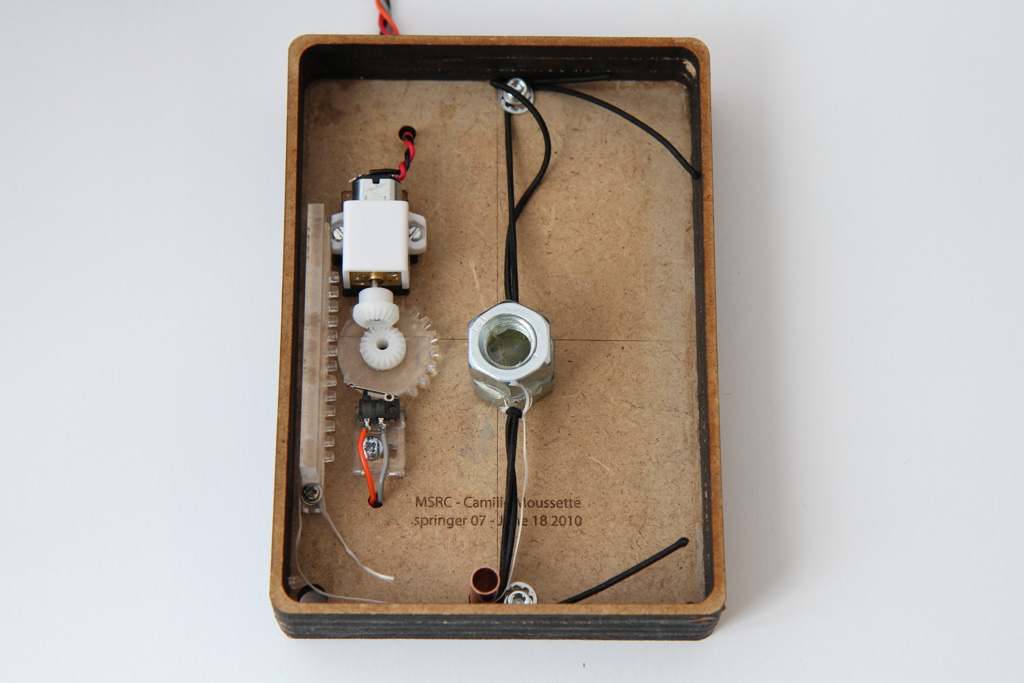
This last iteration is using a simple mechanical switch to coordinate the crank and the release actions. It proved to be much more durable and resilient than the previous solution with the IR sensor. This latest iteration is also optimized for compactness. The motor is now sitting flat in the unit.
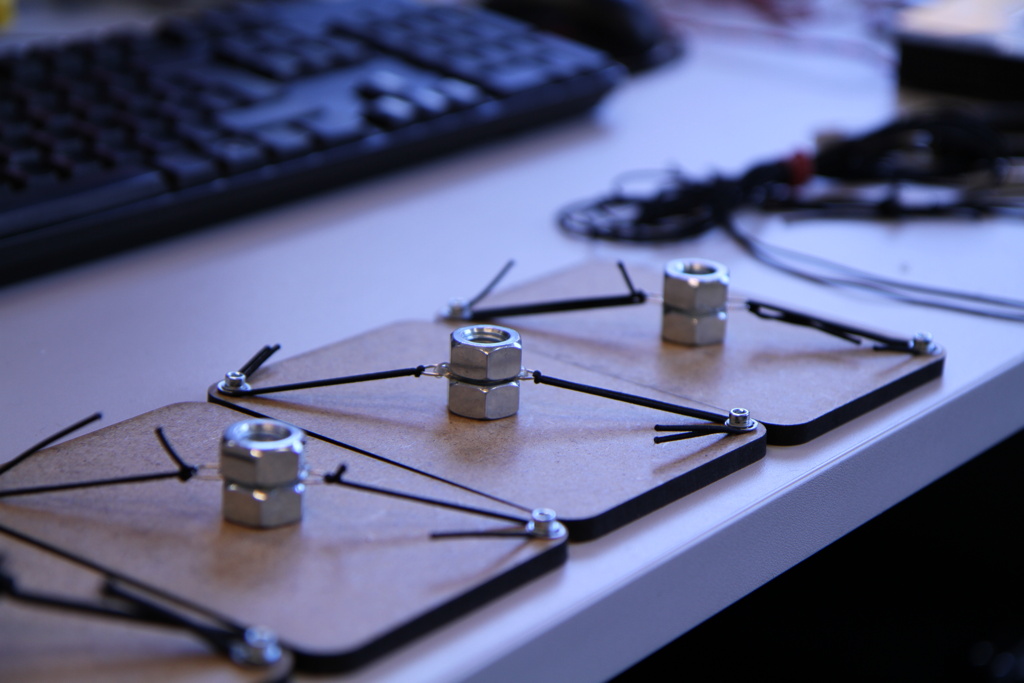
Related photos